

Lower limb exoskeleton structure integrated with self-adaptive knee joints and robot
A knee joint and exoskeleton technology, applied in the field of automation, can solve problems such as lack of forward and backward translation functions, and achieve the effect of solving the discomfort of wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
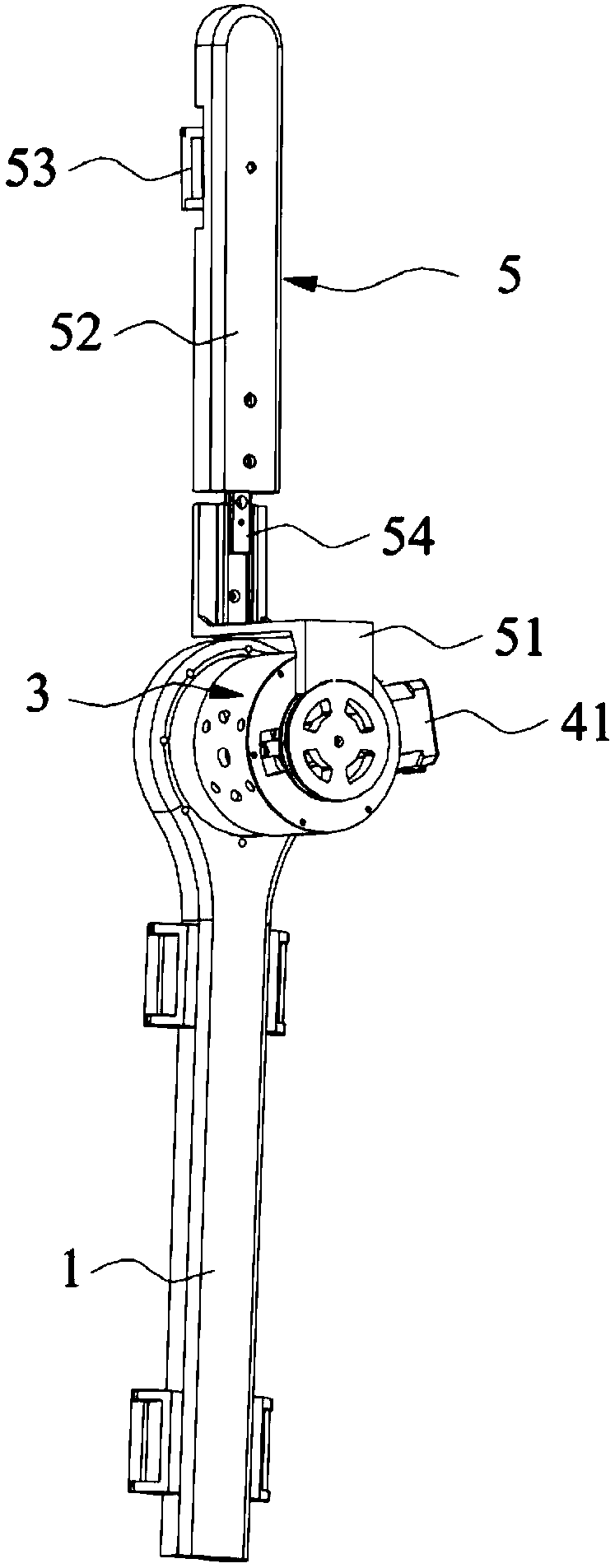
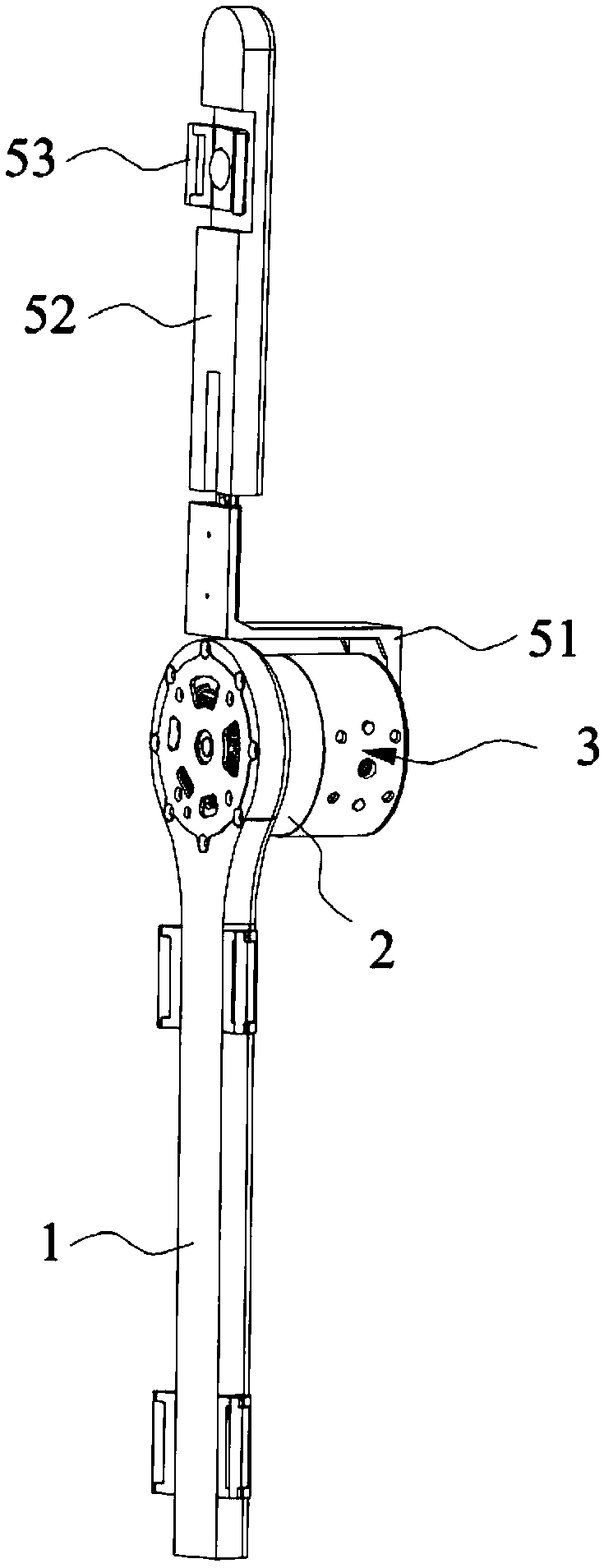
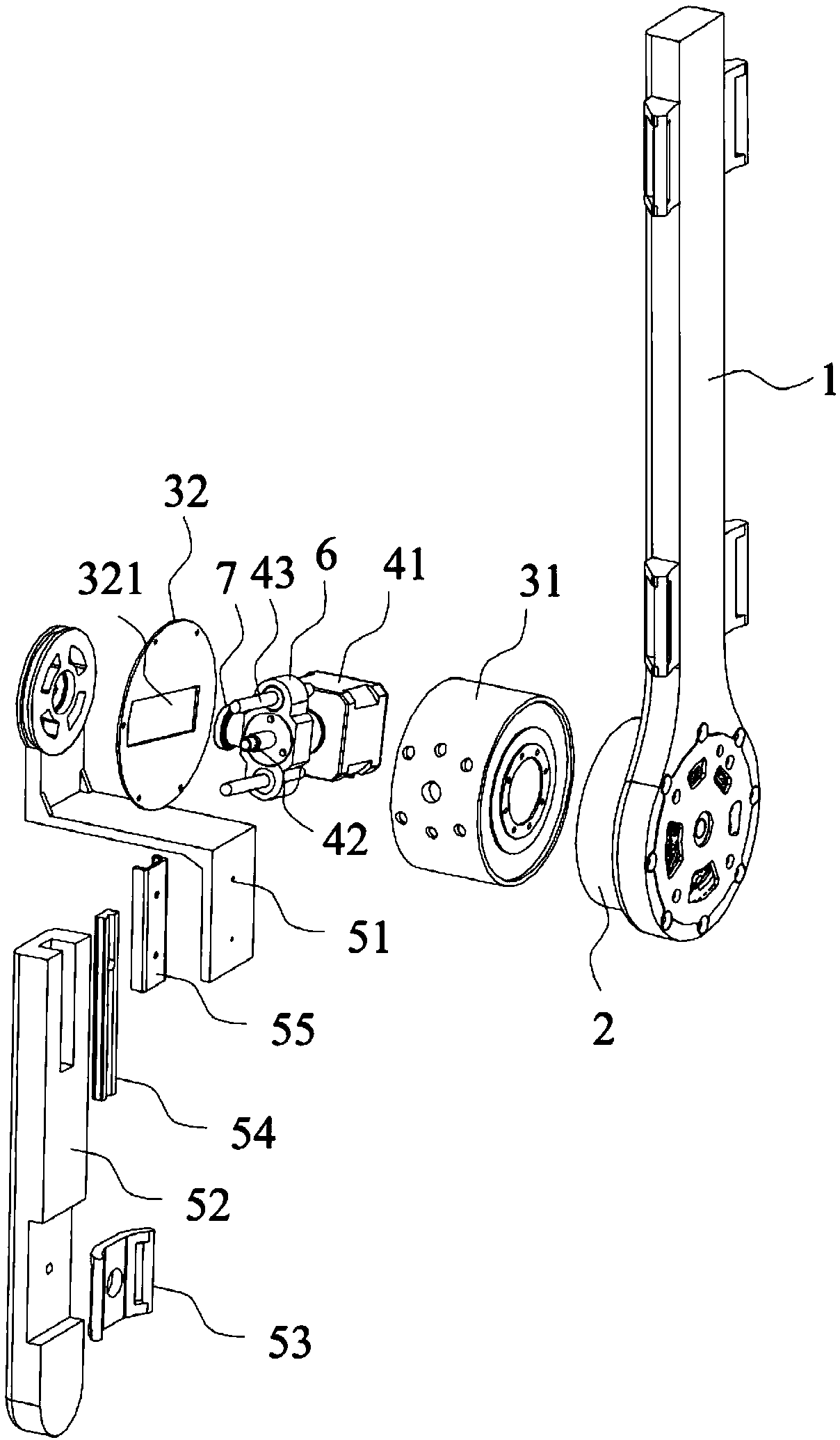
[0032] Such as Figure 1~4 As shown, this embodiment provides a lower extremity exoskeleton structure with fusion adaptive knee joint, which includes a thigh support 1, a first drive mechanism 2, an adapter 3, a second drive Mechanism 4, shank assembly 5 and rotating shaft slide block 6. The thigh support 1 is used to be fixed on the patient's thigh, and the lower leg assembly 5 is used to be fixed on the patient's lower leg. The first drive mechanism 2 is used to drive the thigh support 1 and the adapter 3 to rotate with each other. Specifically, the first drive mechanism 2 is fixedly connected to the thigh support 1, and the first drive mechanism 2 is connected to the adapter 3. The first The driving mechanism 2 can drive the adapter 3 to rotate. The second driving mechanism 4 is mounted on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More