

Gravity gradient kinematic navigation method introducing pseudo measurement when considering deviations
A technology of gravity gradient and navigation method, applied in the direction of navigation calculation tools, etc., can solve the problems of rank deficient observation equation, inability to solve, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
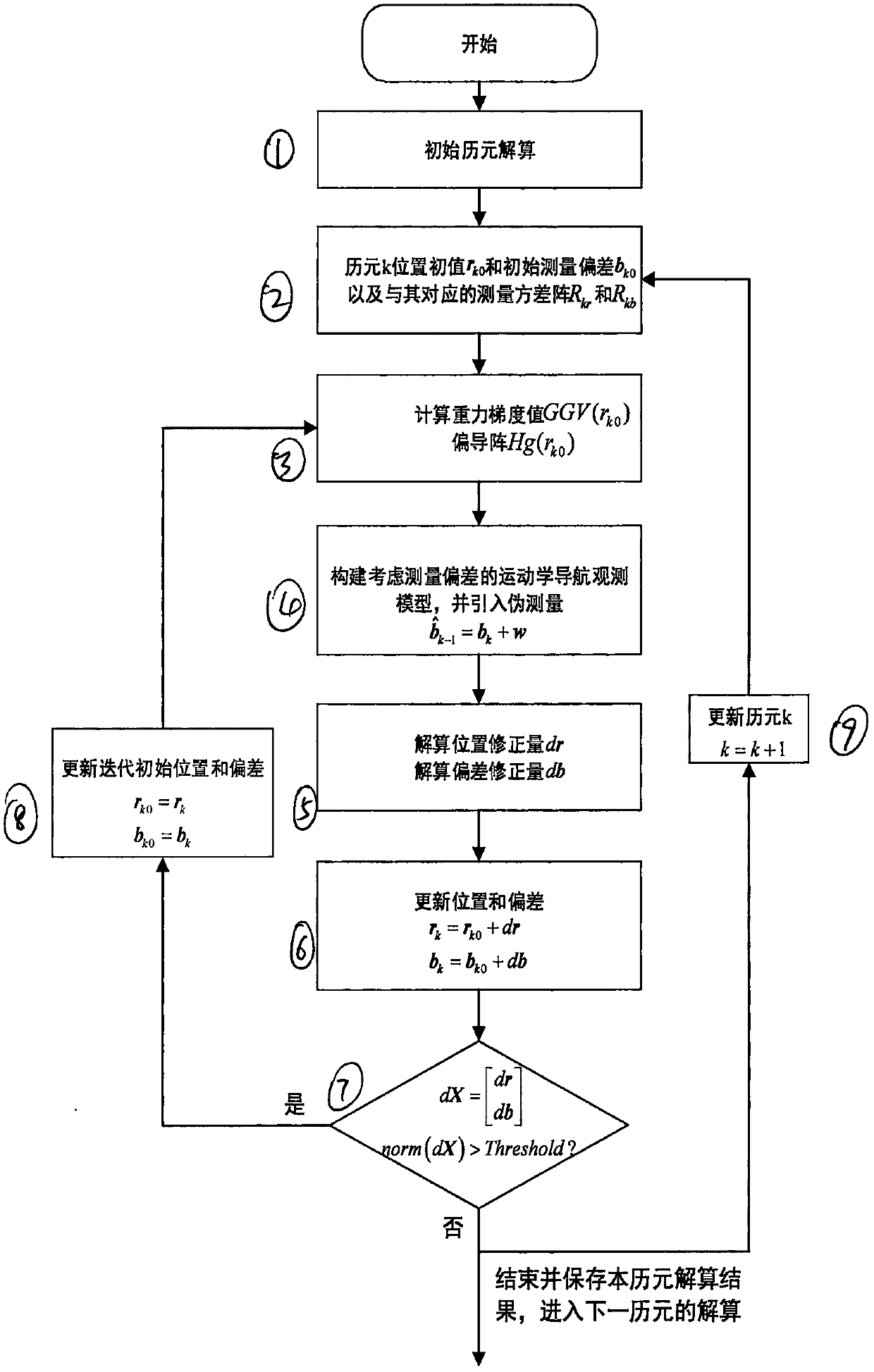
[0128] The present invention is a gravity gradient sequential kinematics navigation method that introduces pseudo-measurements when considering measurement deviations, see the figure in the accompanying drawings figure 1 As shown, its specific implementation steps are as follows:
[0129] Step 1: Initial parameter setting
[0130] The initial value r of the position at epoch k is given k0 and the initial value of the measurement deviation b k0 , the estimated result of the previous epoch can be used as the initial position value r of this epoch k0 and the initial value of the deviation b k0 :
[0131]
[0132] And the actual observation measurement variance matrix R rk and bias observation measurement variance matrix R bk . The actual observation measurement variance is taken as the measurement variance of the GOCE spaceborne gravity gradiometer:
[0133] R rk =diag([15 15 15 350 15 500]) 2 (40)
[0134] And the actual measurement variance does not change with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More