

Spacecraft relative position control method based on finite-time distributed type speed observer
A velocity observer and finite-time technology, applied in the field of relative position control of spacecraft based on finite-time distributed velocity observers, to achieve the effect of avoiding collision problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
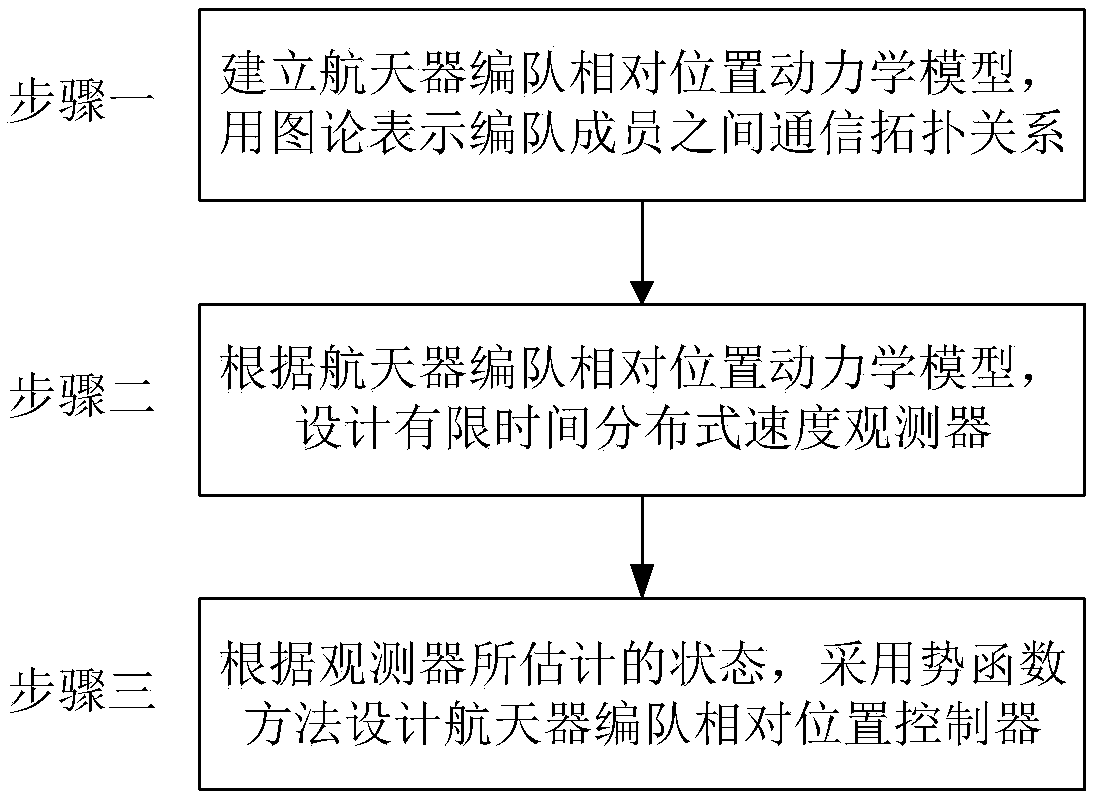
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
[0036] The invention relates to a method for controlling the relative position of a spacecraft formation, which is mainly used in the relative position maintenance and collision avoidance of the spacecraft formation during flight, and at the same time, the lack of speed information of the spacecraft is considered, and the relative position control method is realized without speed measurement. position control. The invention aims at the relative position control and collision avoidance problems of short-distance spacecraft formation, and under the condition that the spacecraft speed cannot be measured, a method for controlling the relative position of the spacecraft formation based on a finite-time distributed velocity observer is proposed.
[0037] The invention provides a method for controlling the relative position of the spacecraft formation based on a distributed v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More