

Suspension type microgravity simulation device and control method
A simulation device and suspended micro technology, which is applied to the simulation device of space navigation conditions, transportation and packaging, space navigation equipment, etc., can solve the problems of small follow-up deviation, damage to the microgravity simulation mechanical environment, etc., to ensure authenticity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
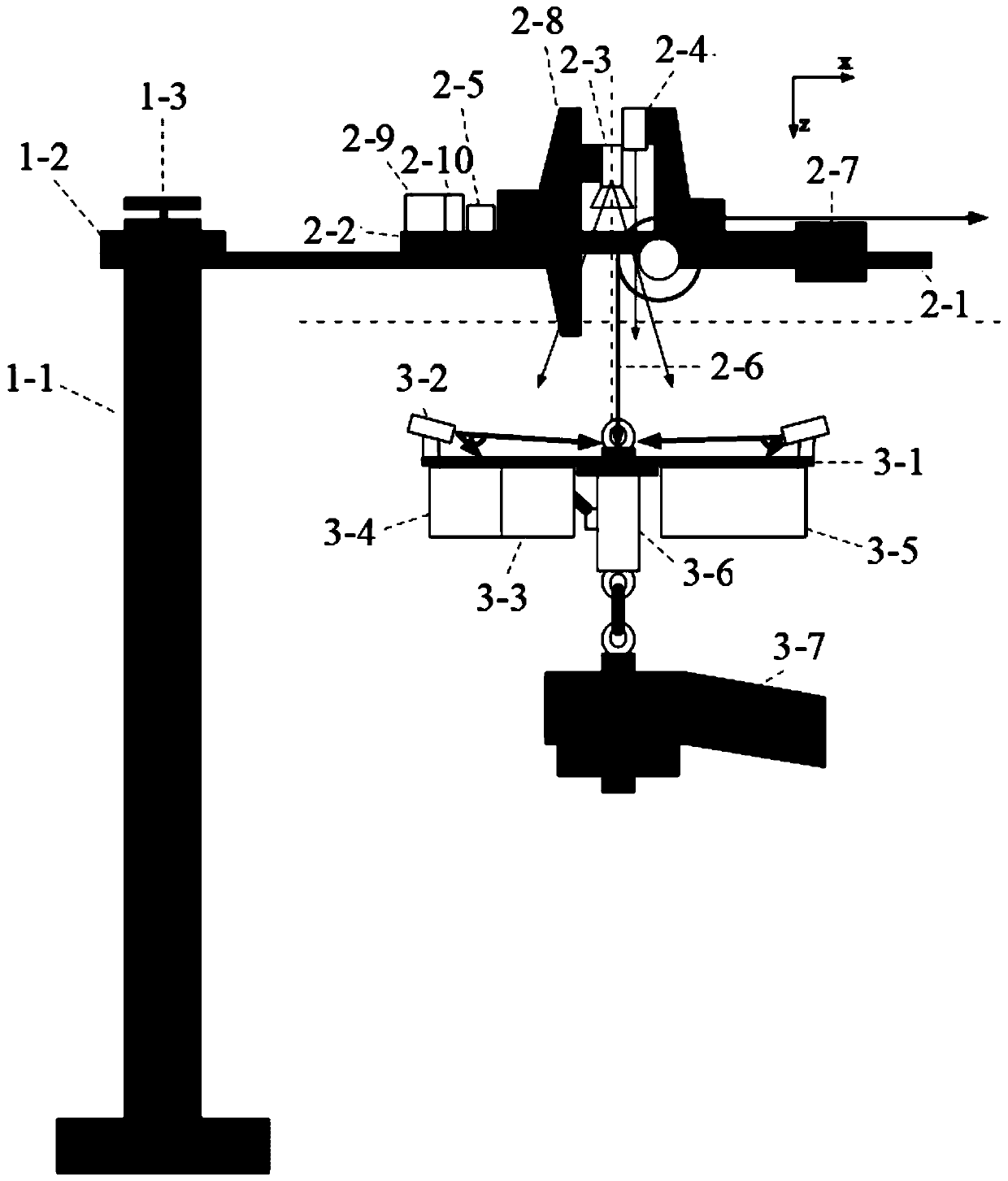
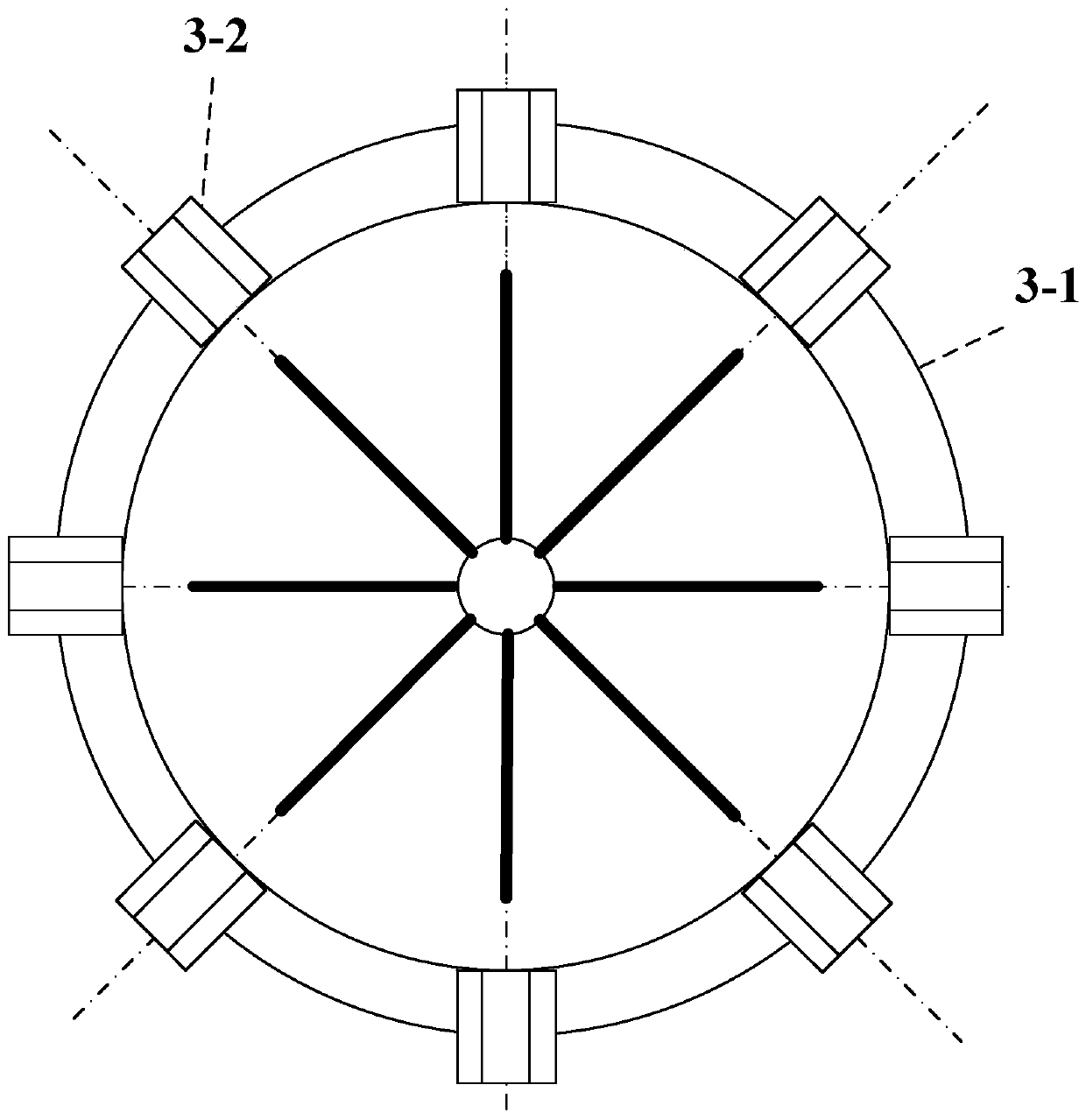
[0013] Specific implementation mode one: combine figure 1 , figure 2 , image 3 and Figure 4 The present embodiment will be described. The device of this embodiment is composed of a support rotation module 1, an arm module 2 and a lifting point module 3, the support rotation module is connected with the arm module 2, and the slings 2-6 in the arm module 2 are connected Lightweight aluminum disc 3-1 connection;
[0014] Described support rotation module is made up of support column 1-1, rotating arm driving motor 1-2 and inclination measuring instrument 1-3, and rotating arm driving motor 1-2 is arranged on the top of supporting column 1-1, and inclination measuring instrument 1 -3 is arranged on the upper end of the supporting column 1-1, the driving motor 1-2 of the rotating arm is connected with the guide rail platform 2-1 of the module on the arm,
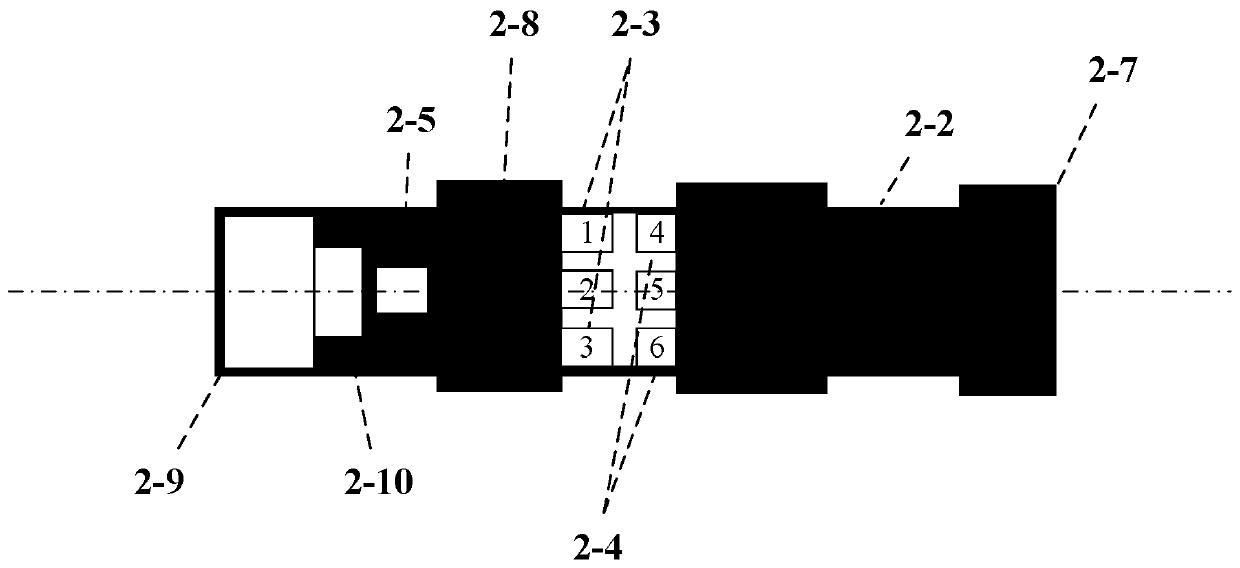
[0015] The above-arm module is composed of a guide rail platform 2-1, a translation vehicle 2-2, a visual sensor 2-3, a...
specific Embodiment approach 2
[0017] Specific implementation mode two: combination figure 1 and figure 2 The present embodiment will be described. 25mm and 50mm cameras 2-3 and two laser range finders 2-4 of the same model are respectively arranged on the translation vehicle 2-2 described in this embodiment.
specific Embodiment approach 3
[0018] Specific implementation mode three: combination figure 1 and figure 2 The present embodiment will be described. The camera described in this embodiment adopts a 3.69um pixel of 30mm. The measurement error is less than 0.5mm, the typical value is 0.1-0.3mm, the pixel resolution is 1mm, and the linear fitting sub-pixel resolution can reach 0.5mm.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Width | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More