

Surrounding vehicle behavior adaptive correction prediction method based on driving prediction field
A prediction method and self-adaptive technology, applied in collision avoidance systems and other directions, to achieve the effect of improving prediction accuracy, improving accuracy, and achieving long-term stable prediction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the drawings.
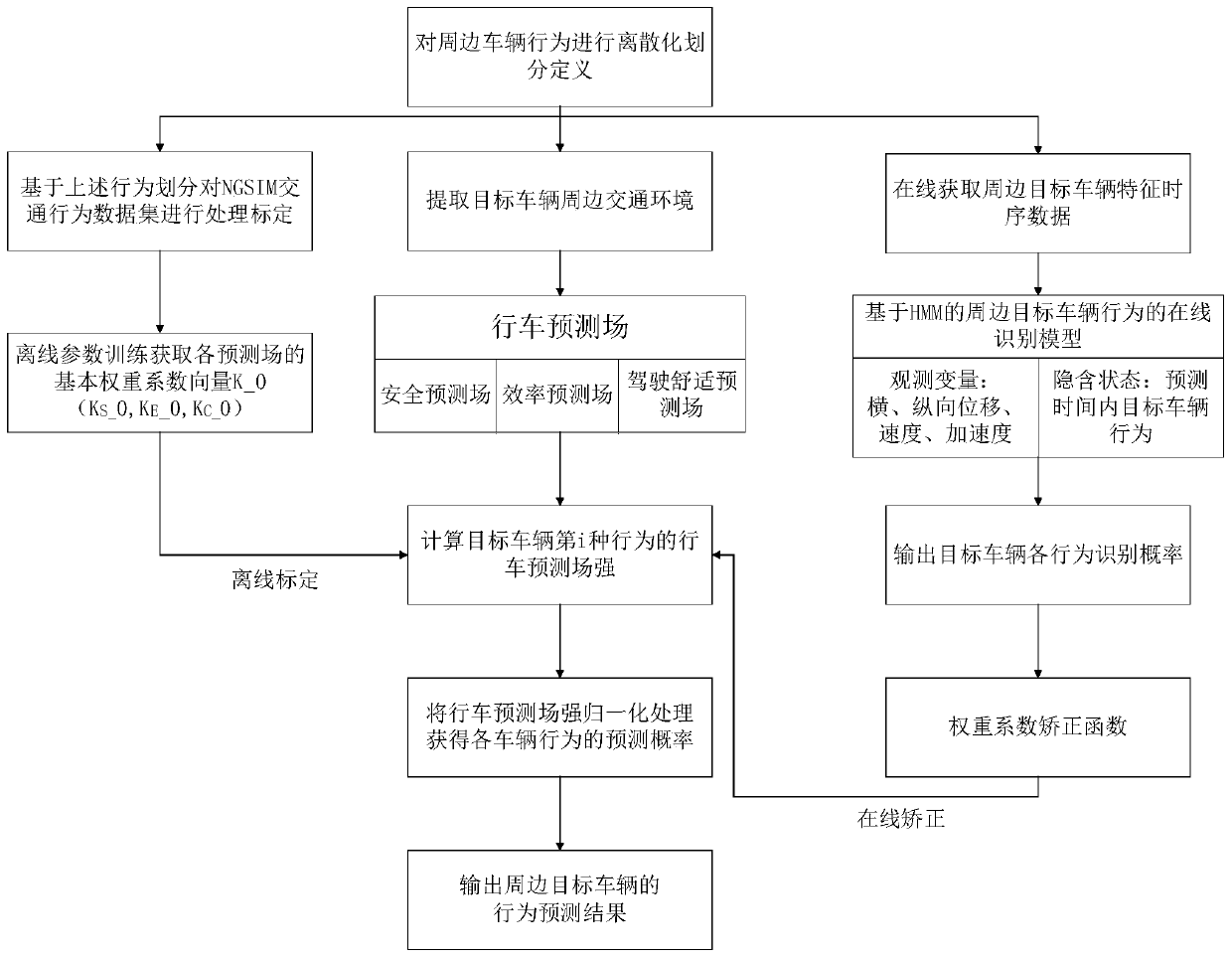
[0061] Such as figure 1 As shown, the implementation of the present invention includes the following steps:
[0062] Step1: Discretization of surrounding vehicle behavior and data set preprocessing
[0063] According to the characteristics of the surrounding target vehicle's behavior with many uncertain factors and complicated and difficult to distinguish, the possible behaviors are divided into two directions of horizontal behavior and vertical behavior for combination and division. From the left lane change (Lane Change to Left), keep lane (Lane Keep), right lane change (Lane Change to Right) in horizontal behavior, acceleration (SpeedIncrease), maintain speed (Speed Keep), deceleration ( Speed Decrease) discretize the behavior of surrounding vehicles into N typical behaviors b i , N=9, respectively, left lane change deceleration (LCL-SD), left lane change constant speed (LCL-SK),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More