Robot obstacle avoidance control method, device, terminal equipment and storage medium
A control method and robot technology, applied in two-dimensional position/channel control and other directions, to achieve the effects of low production cost, improved accuracy, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
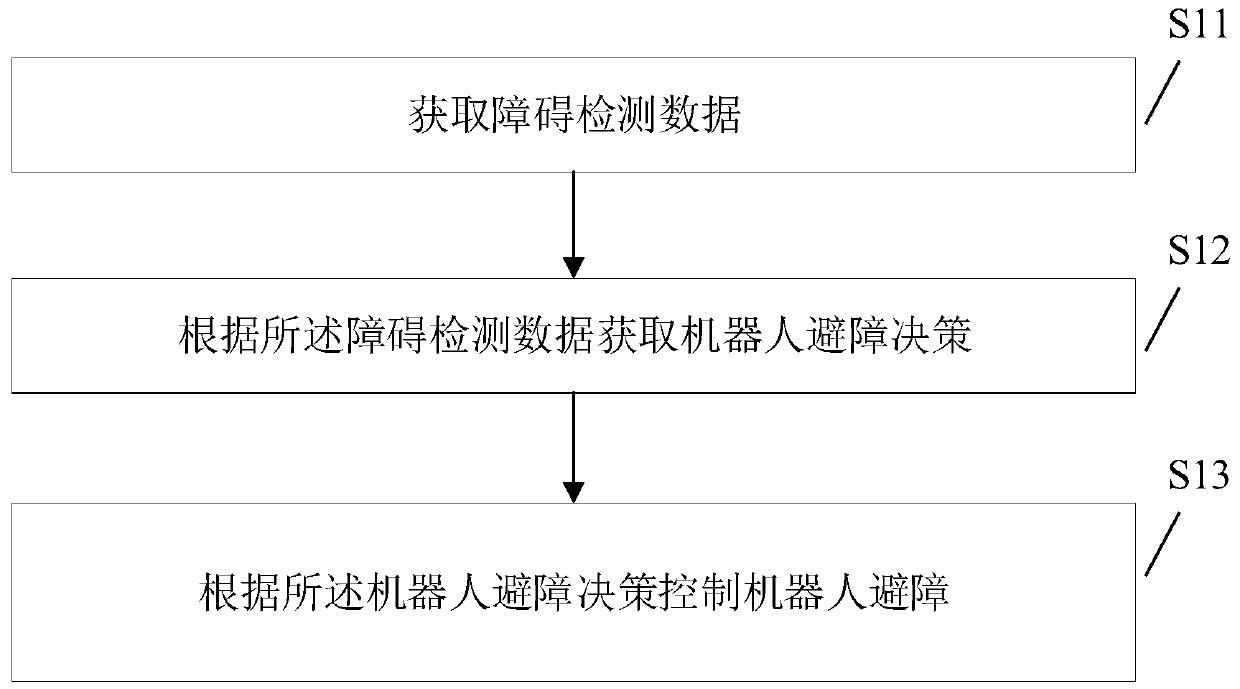
[0031] figure 1 It shows a schematic flowchart of the first robot obstacle avoidance control method provided in the embodiment of the present application, and is described in detail as follows:
[0032] The robot at least includes: a first infrared sensor, a second infrared sensor, a camera, a current sensor, and an ultrasonic sensor. The first infrared sensor is installed on the left front of the robot, and the second infrared sensor is installed on the right front of the robot. Of course, if there are other infrared sensors, they can be installed at corresponding positions of the robot according to actual needs.
[0033] The above-mentioned first infrared sensor, second infrared sensor, camera, current sensor, and ultrasonic sensor are devices with relatively low cost.
[0034] Step S11, obtaining obstacle detection data, the obstacle detection data including: first infrared sensor data, second infrared sensor data, camera data, current sensor data, ultrasonic sensor data. ...
Embodiment 2
[0058] Corresponding to the first embodiment above, image 3 A schematic structural diagram of a robot obstacle avoidance control device provided by an embodiment of the present application is shown, and for convenience of description, only parts related to the embodiment of the present application are shown.
[0059] The robot at least includes: a first infrared sensor, a second infrared sensor, a camera, a current sensor, and an ultrasonic sensor. The first infrared sensor is installed on the left front of the robot, and the second infrared sensor is installed on the right front of the robot. Of course, if there are other infrared sensors, they can be installed at corresponding positions of the robot according to actual needs.
[0060] The robot obstacle avoidance control device includes: an obstacle detection data acquisition unit 31 , a robot obstacle avoidance decision acquisition unit 32 , and a robot obstacle avoidance control unit 33 .
[0061] The obstacle detection ...
Embodiment 3
[0081] Figure 4 It is a schematic diagram of a terminal device provided by an embodiment of the present invention. Such as Figure 4 As shown, the terminal device 4 of this embodiment includes: a processor 40 , a memory 41 and a computer program 42 stored in the memory 41 and operable on the processor 40 . When the processor 40 executes the computer program 42, it realizes the steps in the embodiments of the robot obstacle avoidance control method described above, for example figure 1 Steps S11 to S13 are shown. Alternatively, when the processor 40 executes the computer program 42, the functions of the units in the above-mentioned device embodiments are realized, for example image 3 Function of units 31 to 33 shown.
[0082] Exemplarily, the computer program 42 can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 41 and executed by the processor 40 to complete this invention. The one or more modules / units may be a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More