

A Calculation Method of Dynamic Load Information for Exoskeleton Robot
An exoskeleton robot and dynamic load technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems affecting the balance control and stability of the whole body exoskeleton, and achieve slow convergence, low efficiency, and less workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below with reference to the accompanying drawings and examples.
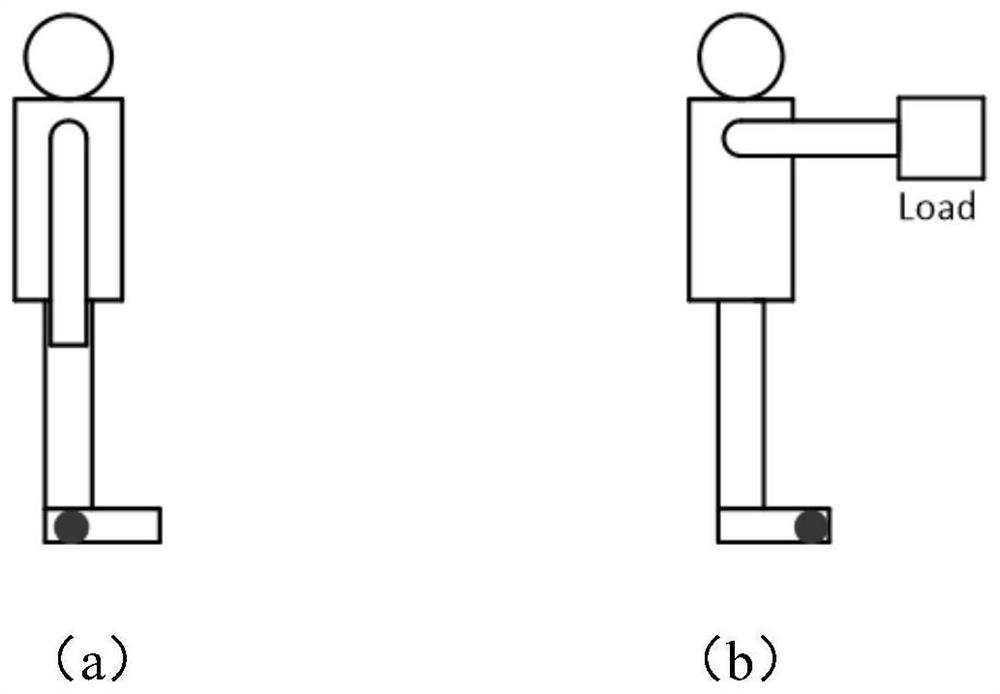
[0020] For the whole body exoskeleton, due to the heavy load of the upper limb exoskeleton operation, the position of the load in the operating space will affect the overall center of gravity of the upper limb exoskeleton and the whole body exoskeleton, which in turn affects the balance control and stability of the whole body exoskeleton . like figure 1 Shown is the position of the center of gravity when the whole body exoskeleton moves the load and does not move the load. The red dot is the overall center of gravity of the whole body exoskeleton, from the top figure 1 It can be seen from the figure that when the load is moved, the overall center of gravity moves from the ankle joint to the direction of the load. Therefore, it is particularly important to calculate the center of gravity of the load. The present invention provides a method for calculating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More