

Intelligent controllable magnetorheological elastomer peanut fruit-picking equipment
A magnetorheological elastomer and peanut picking technology, which is applied in the field of agricultural machinery, can solve the problems of reducing the feeding amount of peanut seedlings and fruit picking efficiency, reducing income, and dirty fruit picking, so as to maximize the efficiency of peanut picking and reduce the The damage rate of small picking fruit and the effect of reducing the phenomenon of entanglement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
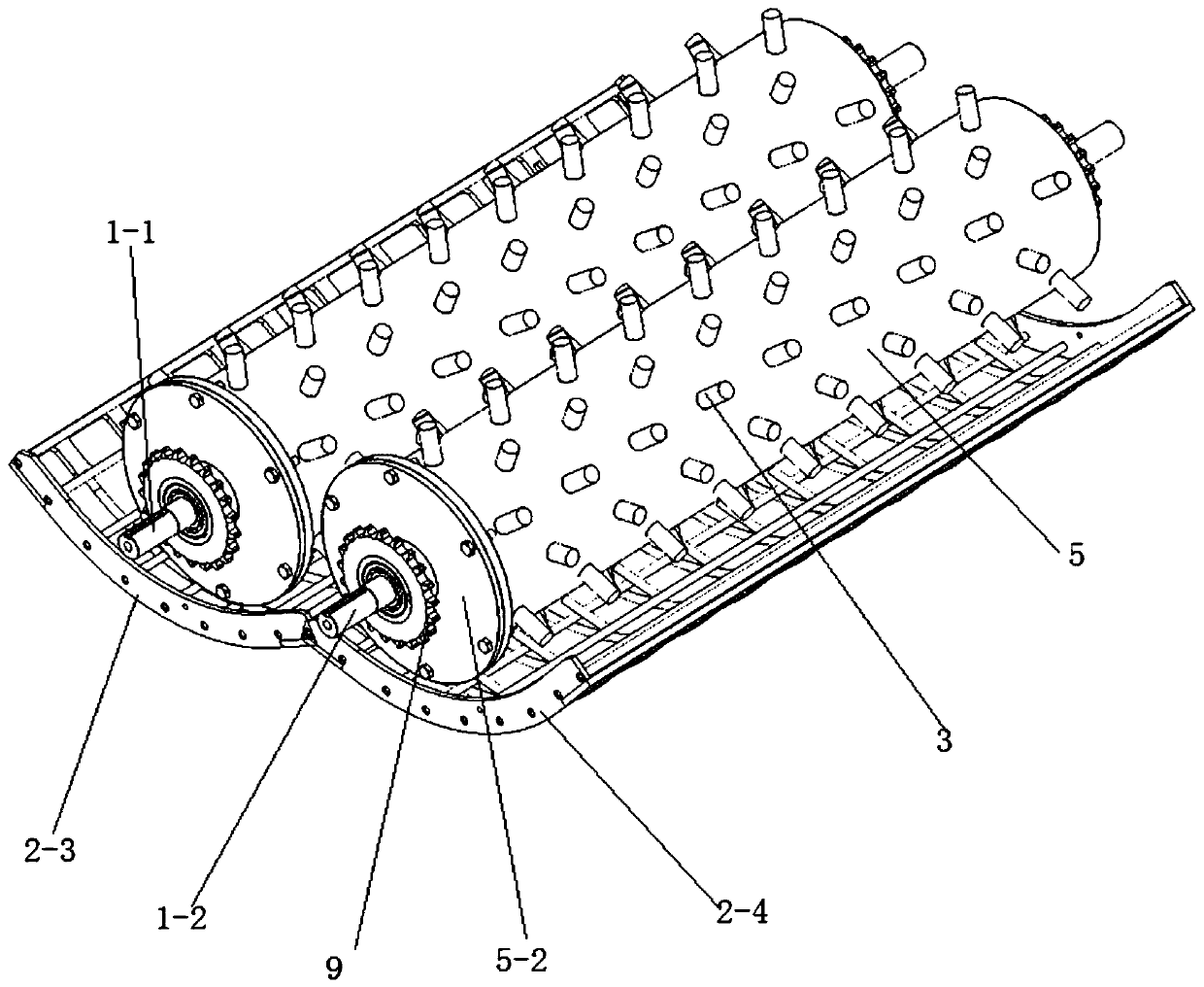
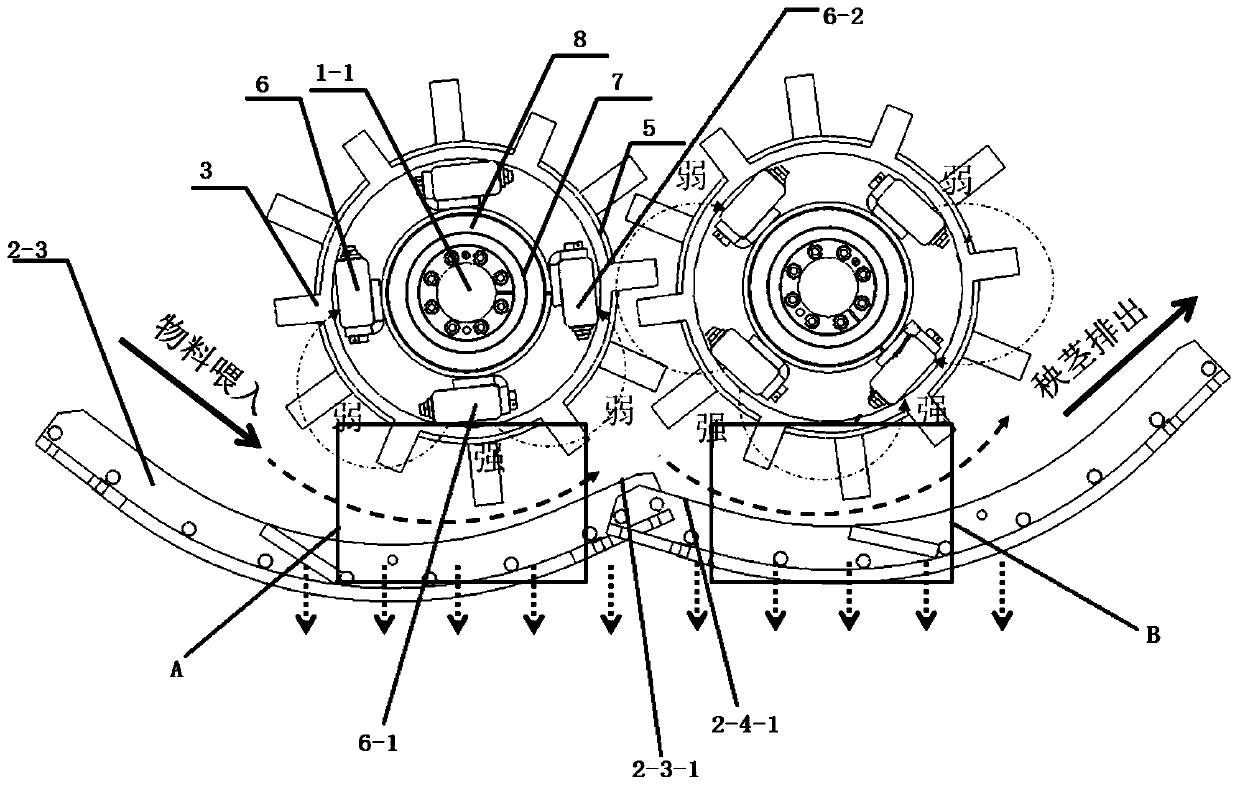
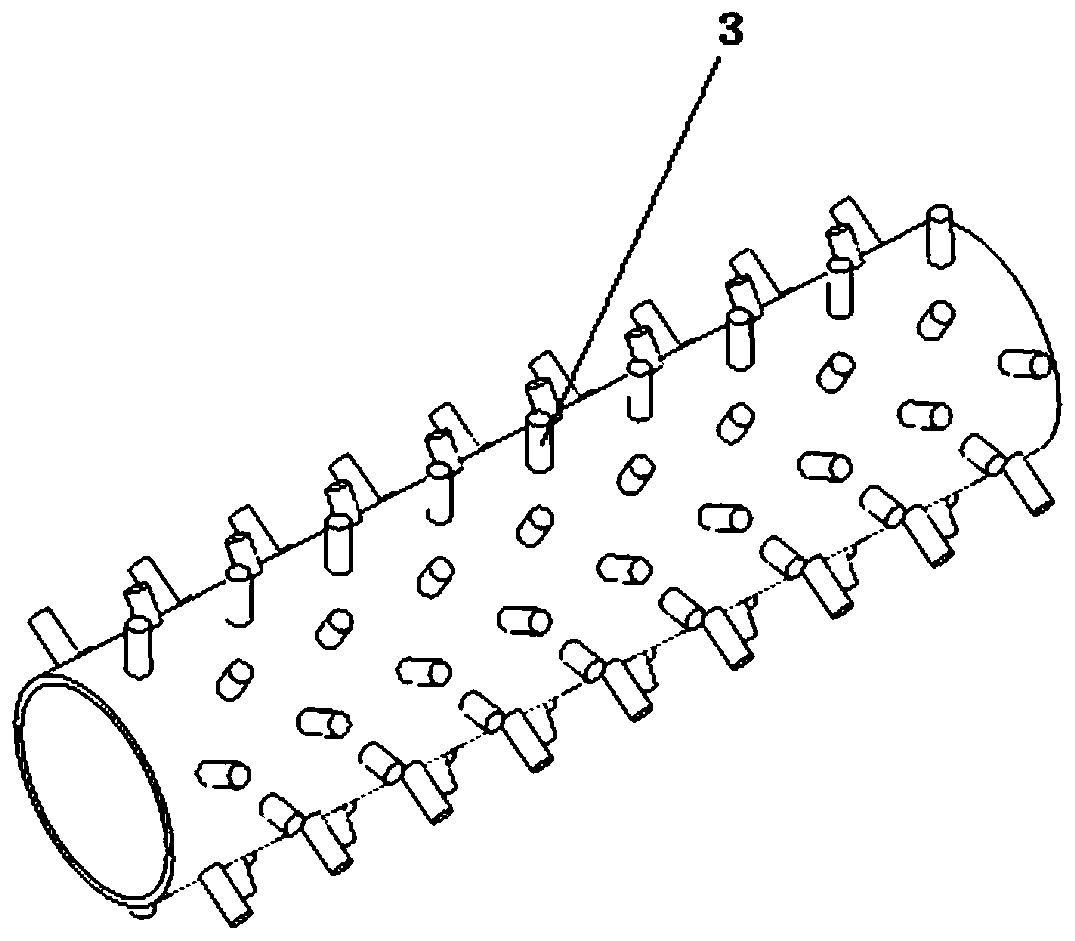
[0022] A kind of intelligent controllable magnetorheological elastomer peanut picking equipment provided in this embodiment, such as Figure 1-4 Shown: at least including the fruit picking roller installed on the frame, not shown in the figure. A pair of parallel installation shafts 1-1 and 1-2 are fixedly installed in the fruit picking drum; a first-level fruit picking roller 2-1 and a second-level fruit picking roller 2-2 are respectively movable installed on the parallel installation shafts; Several long and short magneto-rheological elastic tooth groups 3 are distributed at equal intervals in the circumferential direction of the picking roller; the first-level fruit-picking roller and the second-level fruit-picking roller are both made of magnetorheological elastomer materials; Set the fruit-picking roller steel sleeve 5 that has spring tooth hole 4 on the surface, and described long and short magneto-rheological elastomer spring tooth groups pass through the spring tooth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More