

An online identification method of yaw response parameters based on integral method
A technology of response parameters and identification methods, applied in two-dimensional position/channel control, etc., can solve problems such as inability to apply real-time systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
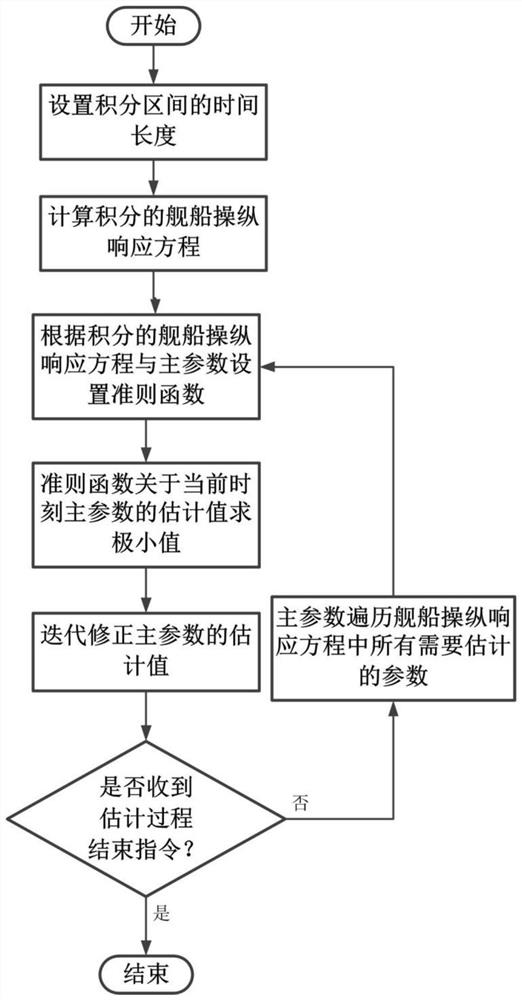
[0045] to combine figure 1 , the present invention provides a method for online identification of ship yaw response parameters based on integral method, the steps of the method are:
[0046] Step (1) sets the time length L of the integral interval;
[0047] Step (2) Integrate the ship maneuvering response equation with respect to time to obtain the integral ship maneuvering response equation. The integral interval is the interval of the time length L from the current moment, that is, the lower limit of the integral is Points are capped at in is the current moment; wherein, the change of the yaw response parameter that needs to be estimated for the ship manipulation response equation described in the integration interval is ignored, that is, the needs of the ship manipulation response equation are considered in the integration interval The estimated yaw response parameter is constant;
[0048] Step (3) sets the criterion function, and the criterion function includes: the...
Embodiment 2
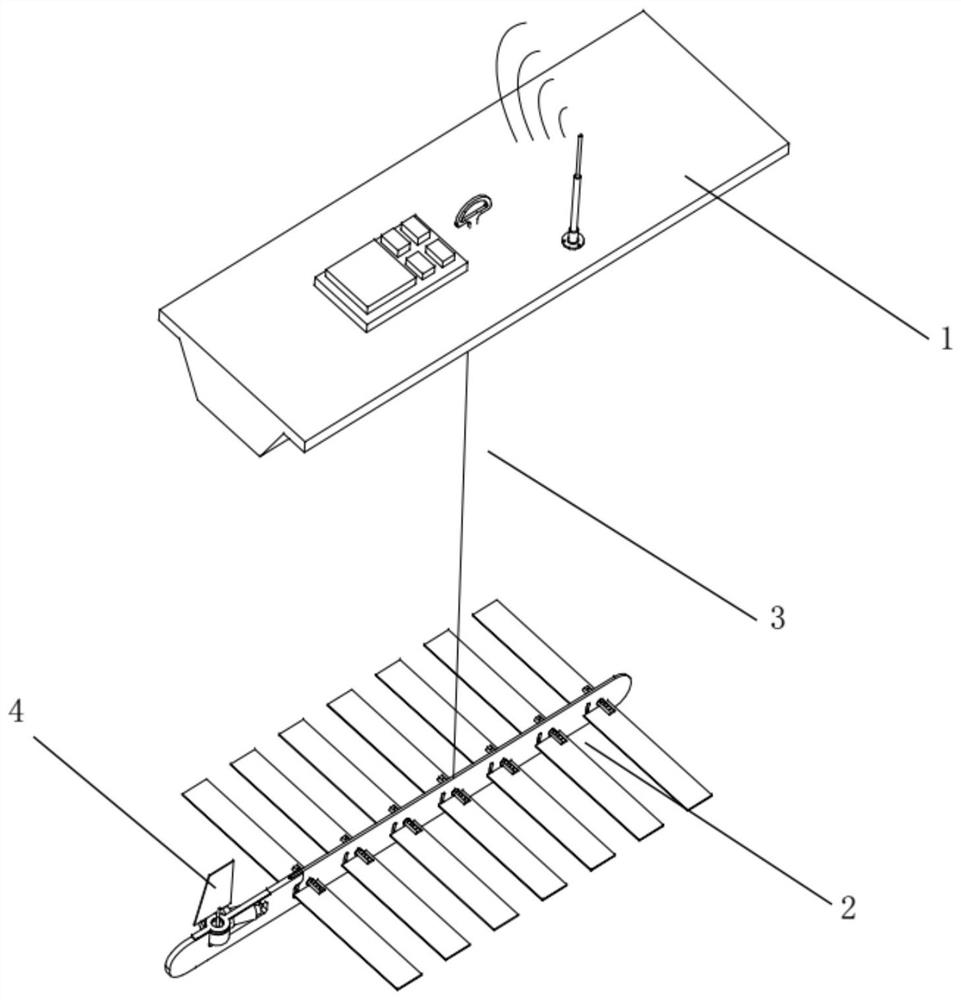
[0072] The invention also proposes an online identification method of the yaw response parameters of the wave glider based on the integral method. The wave glider is a new type of marine vehicle, relying on wave energy to provide forward power, combined with figure 2 Describe the structural composition of the wave glider. The wave glider is composed of a floating body 1 floating on the water surface, a submersible body 2 located under water, and a flexible chain 3 connecting the floating body 1 and the submersible body 2. The turning rudder 4 installed at the tail of the submersible provides the turning moment of the submersible 2, and the pulling force of the flexible chain 3 drives the floating body 1 to turn.
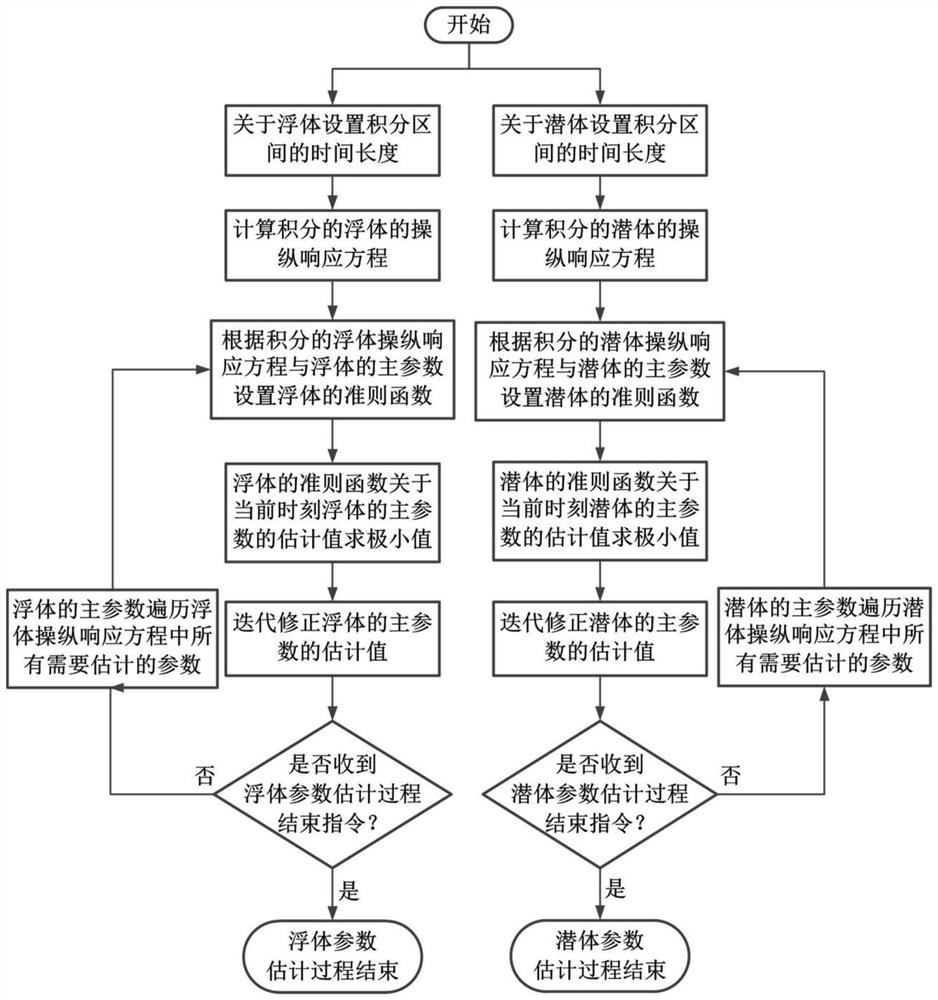
[0073] to combine image 3 An online identification method of wave glider yaw response parameters based on the integral method is described, including the online identification method of the yaw response parameters of the floating body based on the integral method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More