Robot arm mechanism
A technology for manipulators and joints, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high cost and increased arm weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
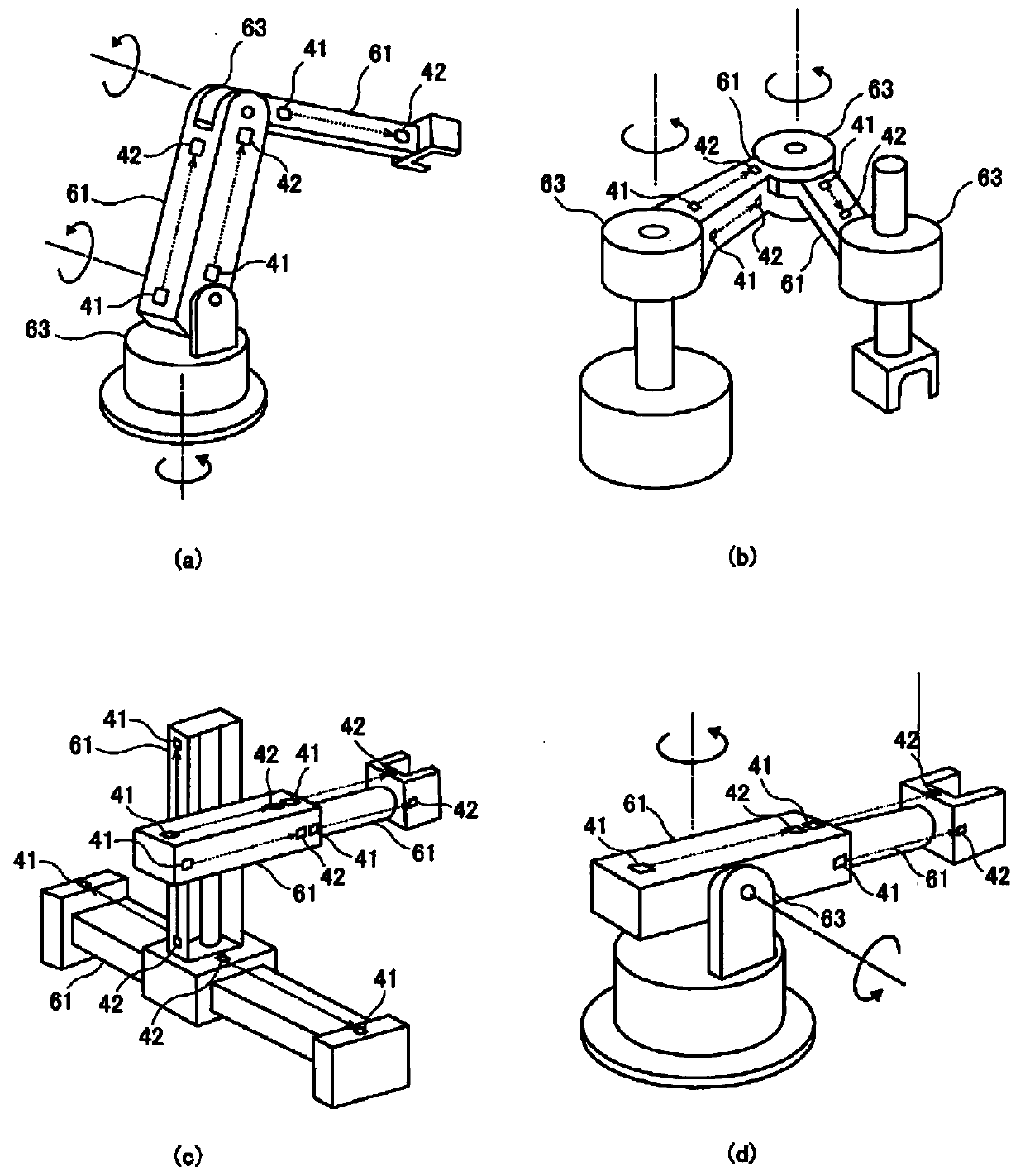
[0020] The robot arm mechanism of this embodiment will be described below with reference to the drawings. There are many types of robotic arm mechanisms. figure 1 (a) is an example of a vertical multi-joint manipulator mechanism, figure 1 (b) exemplifies a horizontal articulated robot arm mechanism (SCARA robot arm mechanism) that has two parallel rotating joints and operates in a selected plane, figure 1 (c) The example is an orthogonal three-axis mechanical arm mechanism with three linear motion joints at the arm, and the axes of these joints conform to the Cartesian coordinate system, figure 1 (d) Illustrated is a polar coordinate type robot arm mechanism having two rotary indirect parts and one direct motion indirect part at the arm, and the axes of these indirect parts constitute a polar coordinate system. There is also a parallel mechanical arm mechanism with a link that forms a closed-loop structure at the arm, with at least one rotary joint and one linear joint at th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More