

Robot control method, device and equipment and medium
A control method and robot technology, applied in the field of information human-computer interaction, can solve the problem of not being able to switch the execution state, and achieve the effect of timely response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
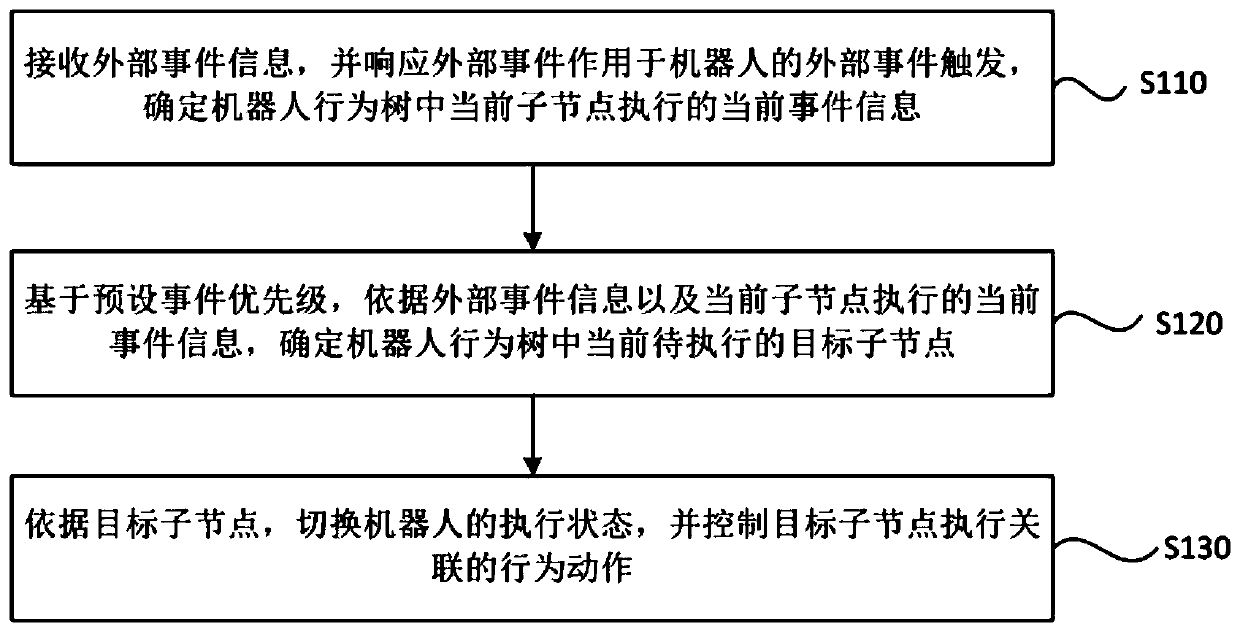
[0029] figure 1 It is a flow chart of a robot control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of controlling an automated intelligent system. Typically, this embodiment is applicable to controlling a robot. The method can be performed by a robot controller. Such as figure 1 As shown, a robot control method provided in this embodiment may specifically include the following steps:
[0030] Step 110, receiving external event information, and responding to external event triggers that the external event acts on the robot, to determine the current event information executed by the current child node in the robot behavior tree.
[0031] In a specific embodiment of the present invention, an external event refers to any event that can trigger a robot, which may be a trigger of a change in the external environment, or may be a user issuing an action command to the robot. The external event information can be external...
Embodiment 2
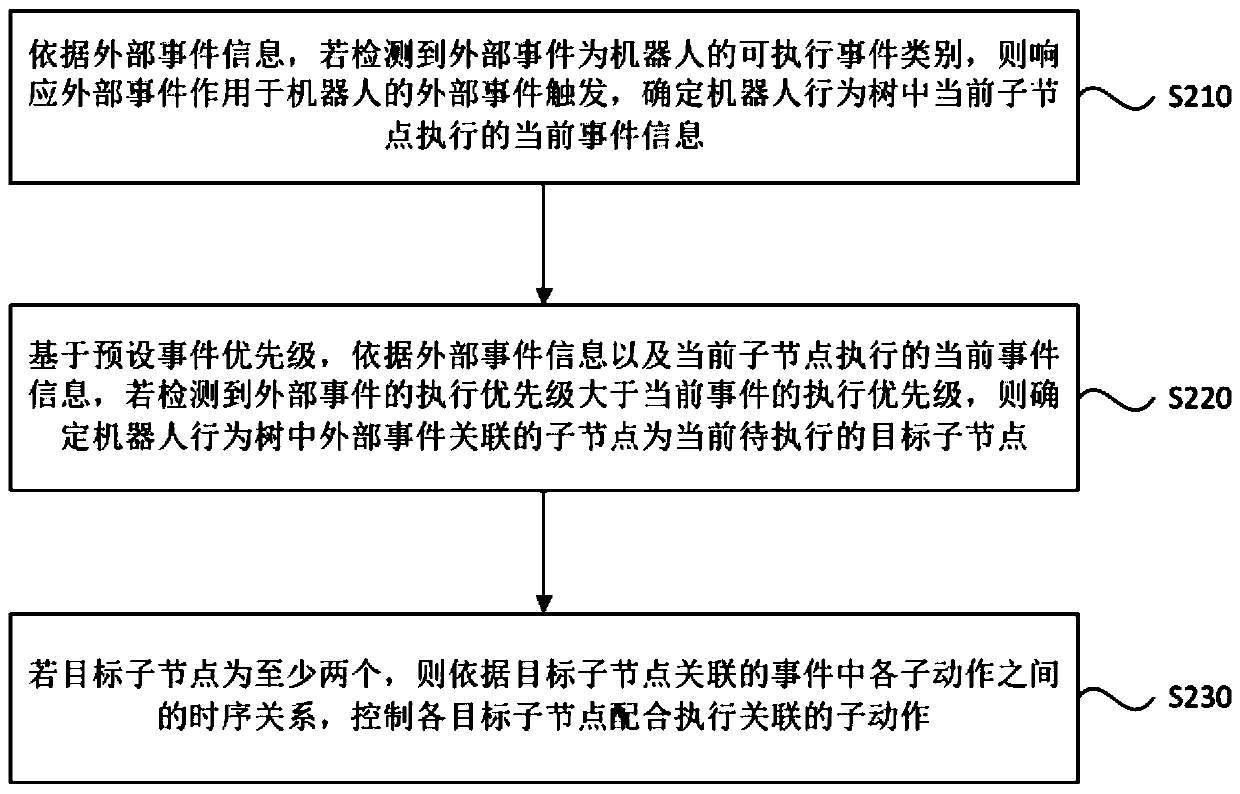
[0043] image 3 It is a flow chart of a robot control method provided by Embodiment 2 of the present invention. This embodiment further refines step 110, step 120, and step 130 on the basis of the above embodiments. Such as image 3 As shown, the method may specifically include the following steps:
[0044] Step 210 , according to the external event information, if the external event is detected as the executable event category of the robot, responding to the external event triggered by the external event acting on the robot, and determining the current event information executed by the current child node in the robot behavior tree.
[0045] Wherein, the executable events may include external events of the robot and internal events of the robot, the external events may be external instructions issued by the user, and the internal events may be pre-programmed task commands of the robot. Executable events are various types of preset executable events. By comparing the externa...
Embodiment 3
[0061] Figure 6 It is a structural diagram of a robot control device provided by Embodiment 3 of the present invention. A robot control method provided by any embodiment of the present invention can be implemented, see Figure 6 A robot control device provided by an embodiment of the present invention includes: an external event response module 310 , a target sub-node determination module 320 and an execution state switching module 330 .
[0062] Wherein, the external event response module 310 is configured to receive external event information, and respond to external event triggers that the external event acts on the robot, and determine the current event information executed by the current child node in the robot behavior tree.
[0063] The target sub-node determination module 320 is configured to determine the current target sub-node to be executed in the robot behavior tree based on the preset event priority, according to the external event information and the current e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More