

Non-cooperative spacecraft attitude estimation method based on virtual sliding mode control
An attitude estimation and non-cooperative technology, applied in the direction of integrated navigator, etc., can solve the problems of slow filter convergence speed, high model accuracy requirements, and decreased estimation effect, so as to reduce the amount of calculation, fast convergence speed, and reduce calculation volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings.
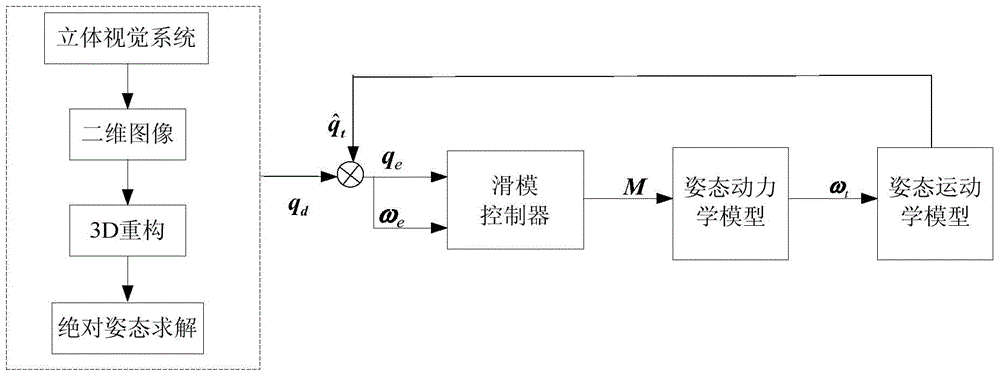
[0047] A non-cooperative spacecraft attitude estimation method based on virtual sliding mode control, such as figure 1 As shown, it includes a sliding mode controller based on Lyapunov's principle of virtual control; the real-time observation data output by the stereo vision system is converted into the absolute attitude of the target star as the control target of the sliding mode controller; according to the target satellite is a non-cooperative satellite, and After the non-cooperative satellite is out of control, the motion characteristics of the final approximate rotation around a fixed axis are established, and the virtual satellite motion model is established; the sliding mode controller takes the dynamic model of the virtual satellite as the control object, and obtains the attitude parameters of the virtual satellite; The attitude parameters and the absolute atti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More