

Aircraft operation path planning method, control device and control equipment
A path planning and aircraft technology, applied in the field of aircraft, can solve problems such as the inability to safely and quickly enter the work site, and achieve the effects of improving operational timeliness, avoiding injuries, and increasing flight speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing and embodiment:
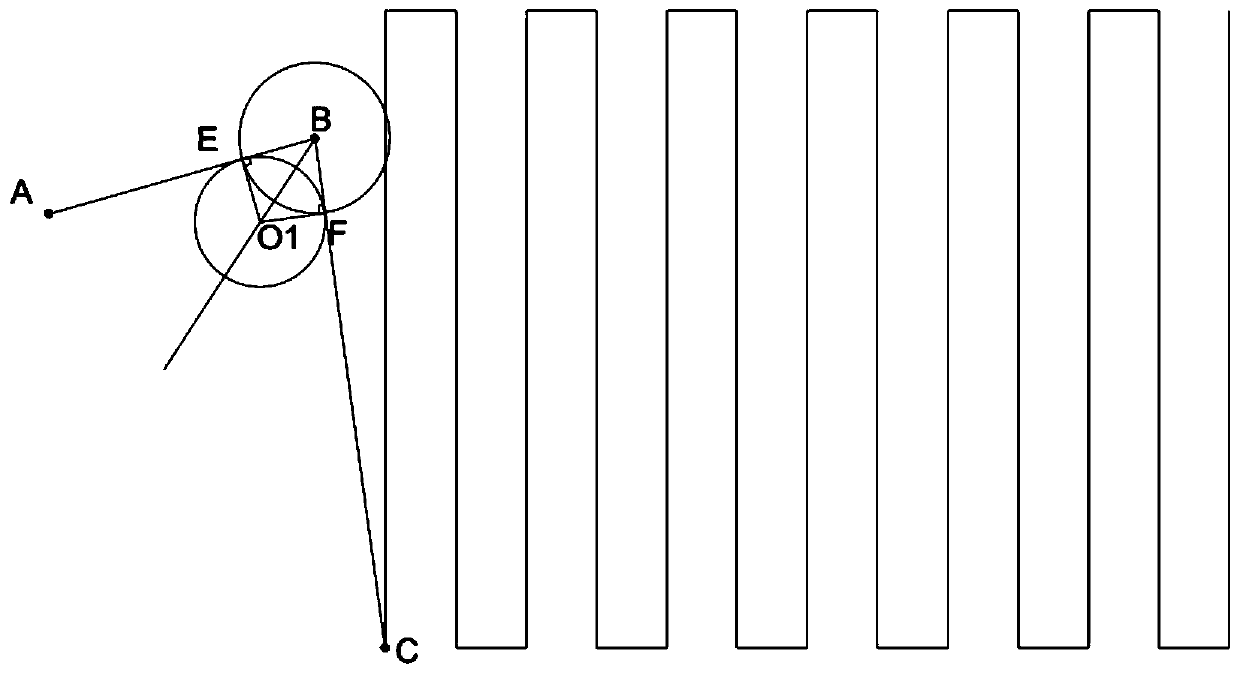
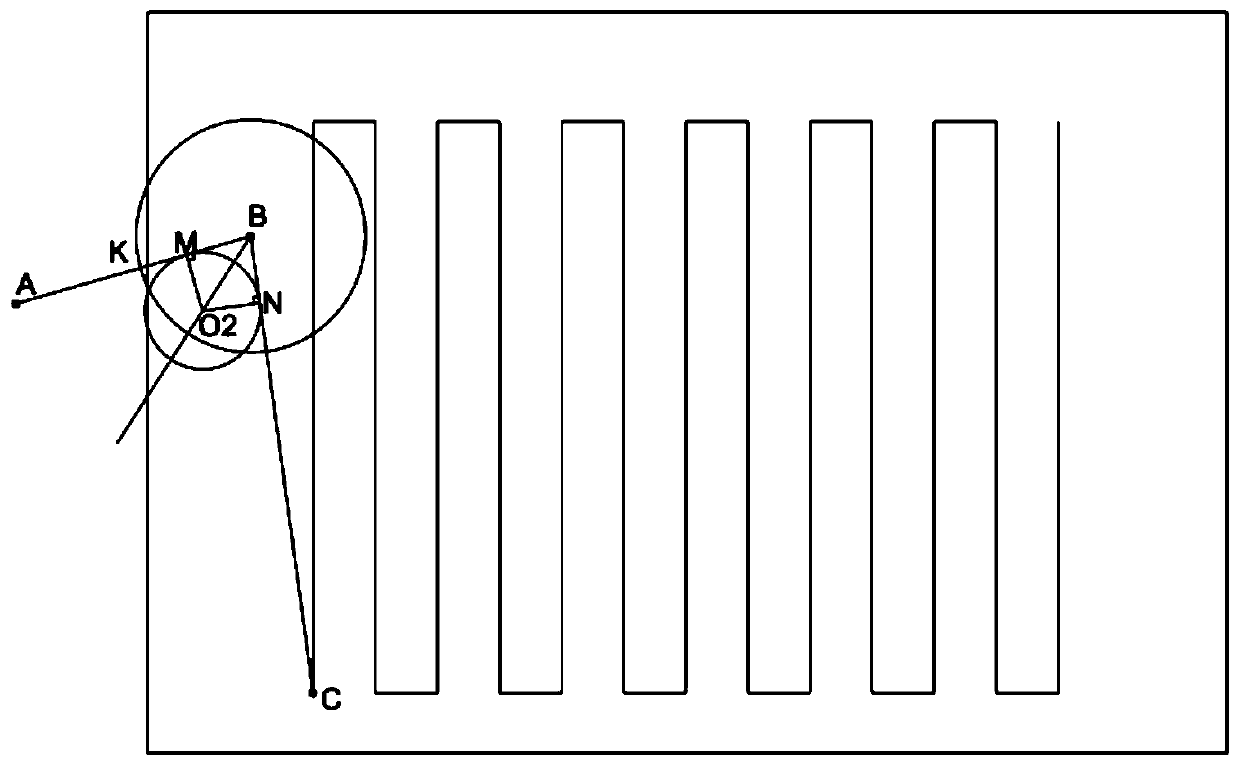
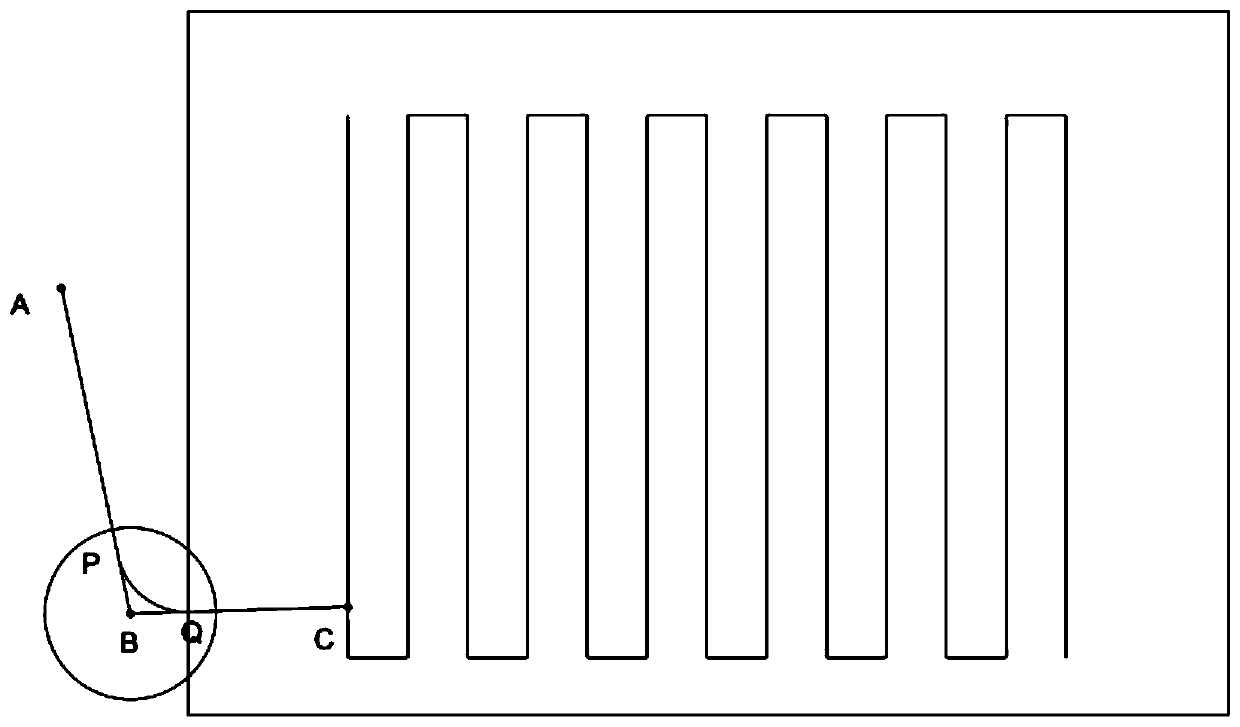
[0039] The invention discloses an aircraft operation path planning method to solve the problem in the prior art that safe and rapid passing of the operation boundary cannot be realized. Specific methods include:
[0040] S100: Obtain the stop point and operation point, and obtain the safety point, there is no obstacle within the safe distance around the safe point, that is, within the range less than or equal to the safe distance, there is no obstacle affecting the flight, ensuring that the aircraft can be safe For flying, the safety distance can be 2m, 2.5m, 3m, 3.5m, 4m, etc., which can be set according to the inherent parameters of the aircraft and / or environmental conditions, etc., and there is no limitation here. The stop point is the take-off point or the landing point, which can be automatically determined or manually determined during the flight, or ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More