Auxiliary positioning method and system for joint replacement surgery based on inertial navigation
An auxiliary positioning system and joint replacement technology, applied in the direction of bone drill guidance, etc., can solve the problems of long operation time, high price, and bulky volume, and achieve the effects of shortening operation time, reducing patient pain, and reducing cost and price
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] Such as Figure 1-5 As shown, the inertial navigation-based auxiliary positioning method for joint replacement surgery described in this embodiment includes the following steps:
[0052] Step S1, establish the reference inertial sensor 8, adjust the communication connection between the inertial sensor 9 and the control terminal, and initialize the system;
[0053] Step S2, after the system initialization is completed, refer to the inertial sensor 8, adjust the inertial sensor 9 to be installed in the calibration device, and perform calibration;
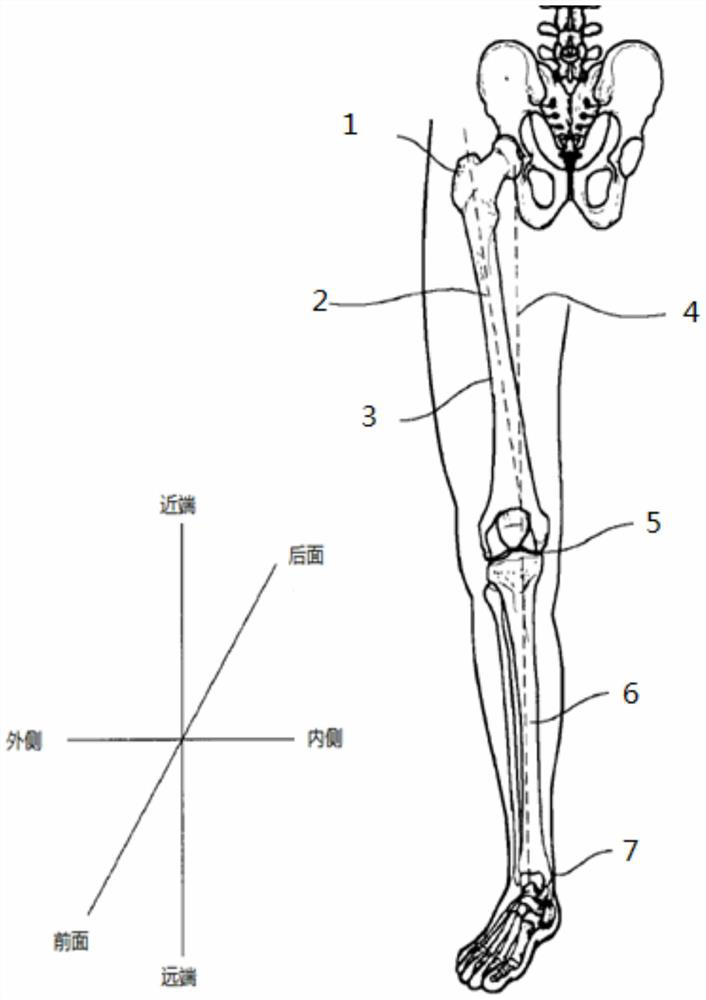
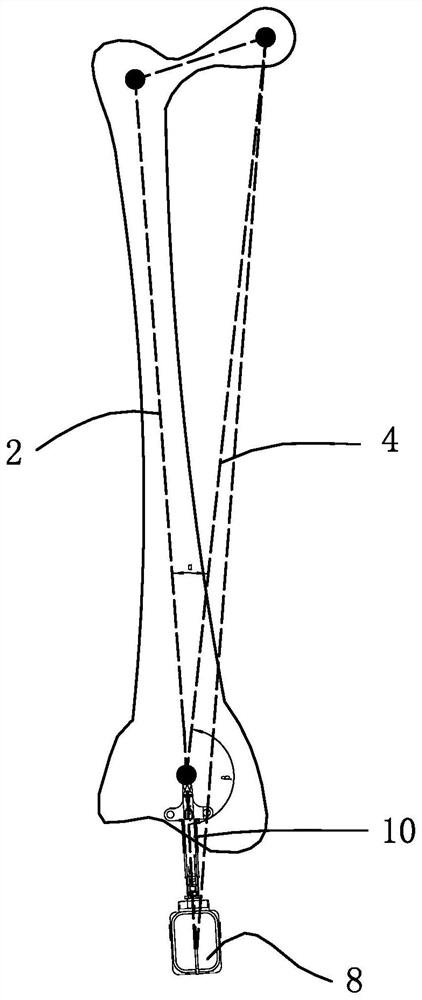
[0054] Step S3, after the calibration is completed, register the femur, fix the femoral long nail at the point where the mechanical force line 4 enters the marrow, fix the reference inertial sensor 8 on the femoral long nail through the reference fixture 10, and establish the reference coordinate system X1, Y1, Z1 , move the lower limbs, refer to the inertial sensor 8 to periodically collect its position coordinate information...
Embodiment 2
[0069] This embodiment provides a system for implementing the above inertial navigation-based auxiliary positioning method for joint replacement surgery, such as Image 6 As shown, it includes a reference inertial sensor, a control terminal, a reference fixation frame, an adjustment inertial sensor, a distal femoral osteotomy adjustment device, a distal femoral osteotomy guide, and a femoral saw slot, wherein the reference inertial sensor and the adjustment inertial sensor pass through The wireless communication module communicates with the control terminal, the reference fixation frame is used to fix the reference inertial sensor and the distal femoral osteotomy adjustment device, the distal femoral osteotomy guide is used to fix and adjust the inertial sensor and the femoral saw groove, and the distal femoral osteotomy One end of the guider fixing the sawing groove of the femur is fixedly connected with the osteotomy adjusting device at the distal end of the femur.
[0070] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com