

Bionic mechanical exoskeleton wearing device
A wearable device, bionic machine technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of bulky power system, inaccurate control, poor mobility, etc., to improve comfort, improve load-bearing capacity, The effect of saving energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
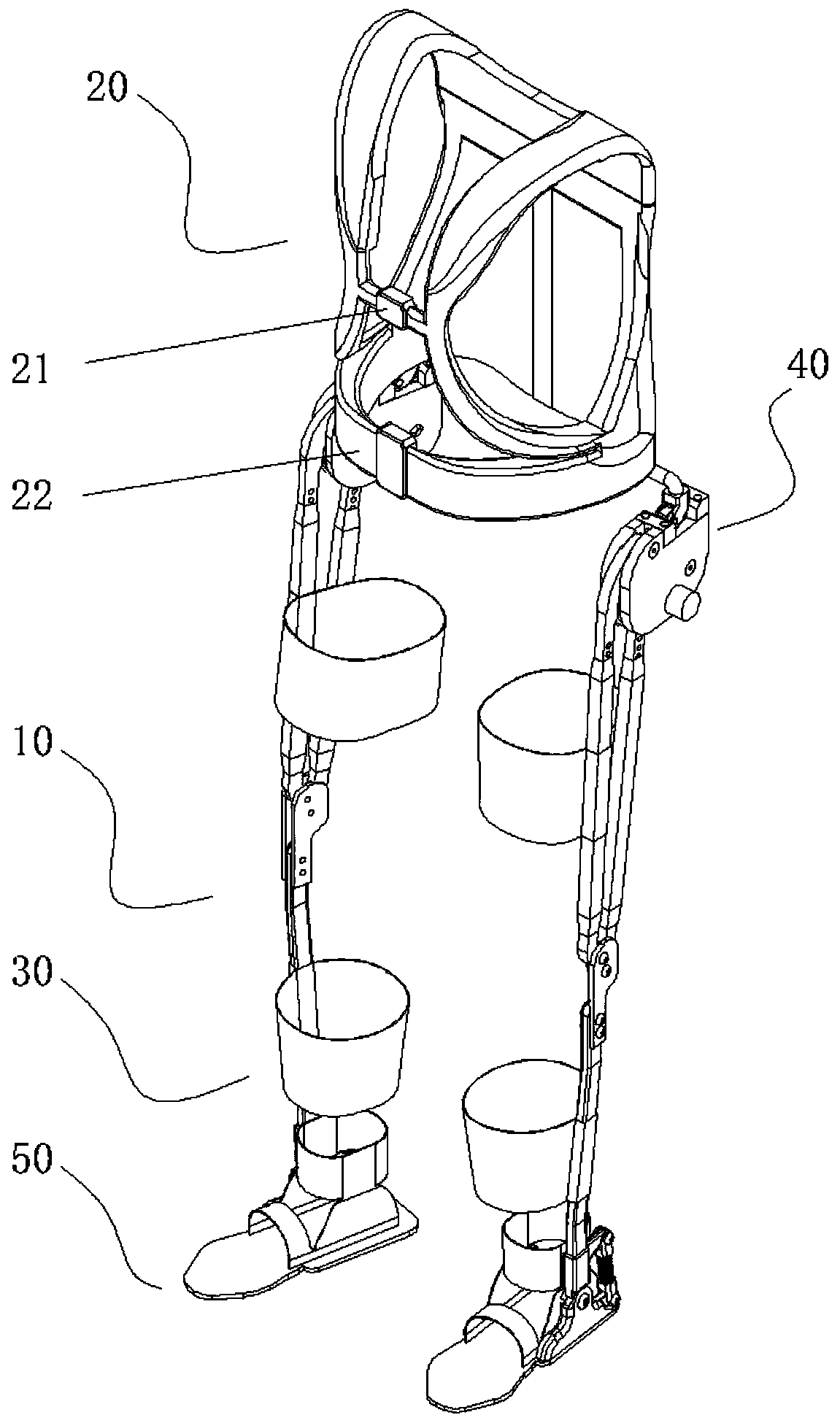
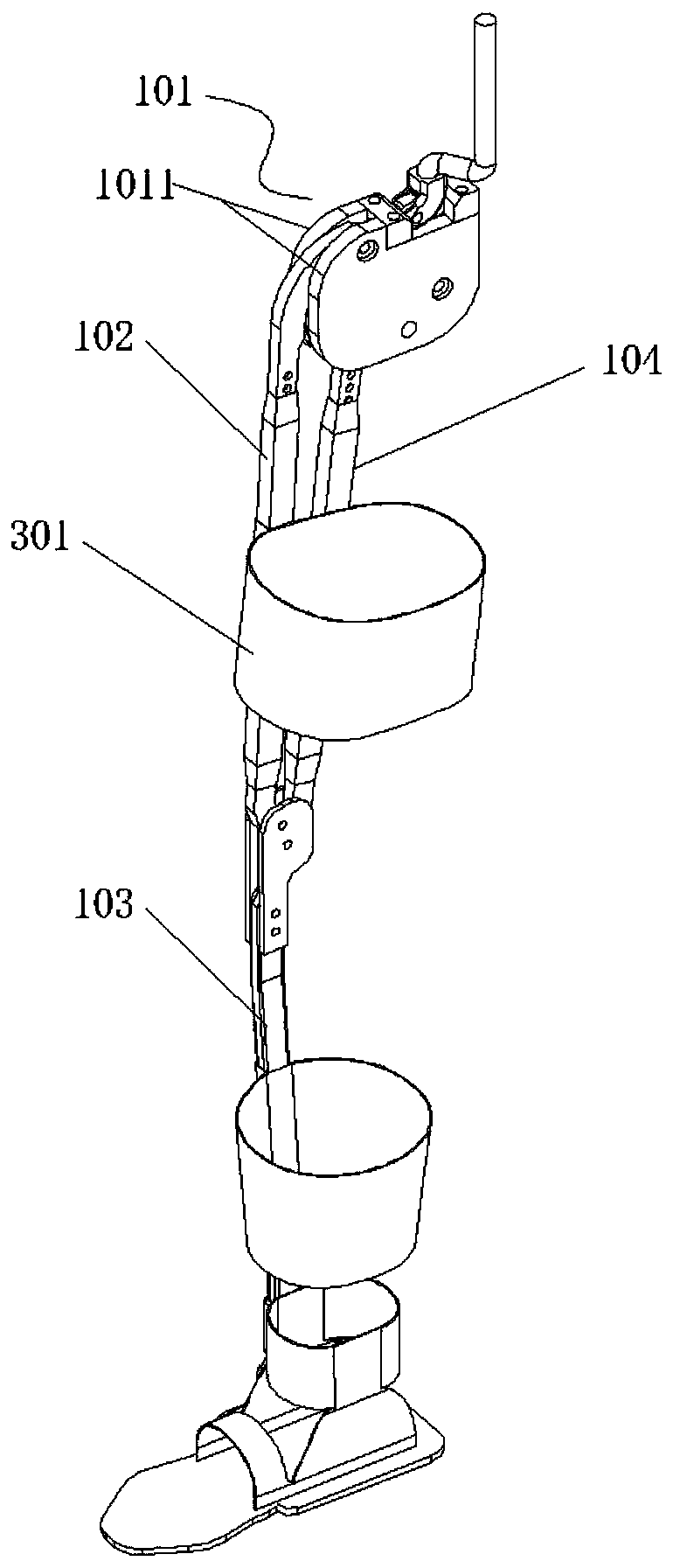
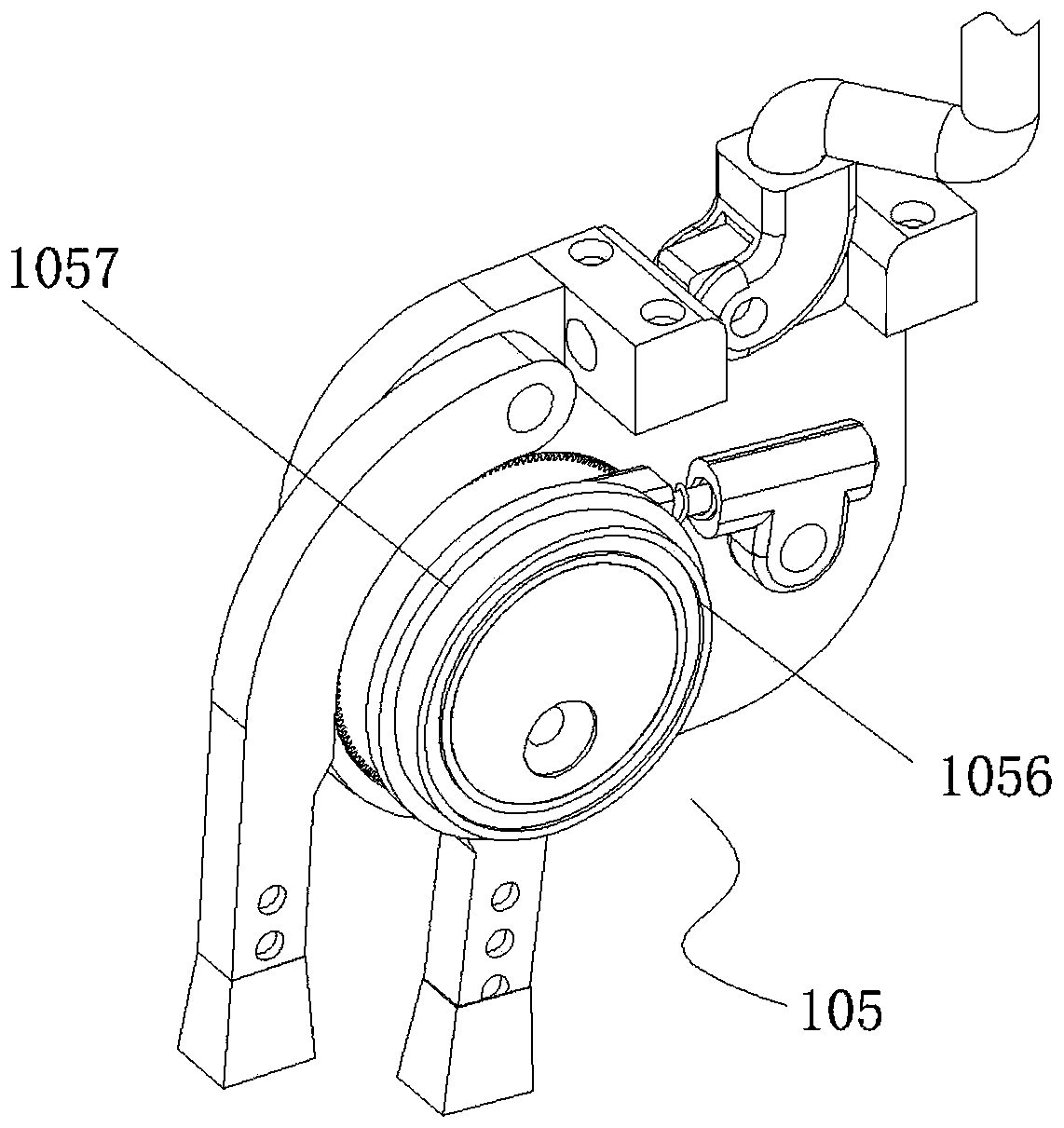
[0034] figure 1 It is a schematic diagram of the three-dimensional structure of the present invention; figure 2 Schematic diagram of the exoskeleton structure for lower limbs; image 3 It is a schematic diagram of the drive assembly structure; Figure 4 Schematic diagram of the internal structure of the drive assembly figure 1 ; Figure 5 Schematic diagram of the internal structure of the drive assembly figure 2 ; Image 6 Schematic diagram of the knee joint structure; Figure 7 A schematic diagram of the internal structure of the knee joint; Figure 8 It is a schematic diagram of the structure of the foot assembly; Figure 9 It is a schematic diagram of the structure of the hip joint system;
[0035] The X-axis direction is the left-right direction after the human body wears the bionic mechanical exoskeleton wearing device, the Y-axis direction is the front-back direction after the human body wears the bionic mechanical exoskeleton wearing device, and the Z-axis dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More