

UAV three-dimensional path design method based on global optimal brainstorming algorithm
A brainstorming and global optimal technology, applied in three-dimensional position/channel control, etc., can solve the problem that UAVs cannot fly safely and quickly, and achieve the effect of over-reliance on algorithm parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
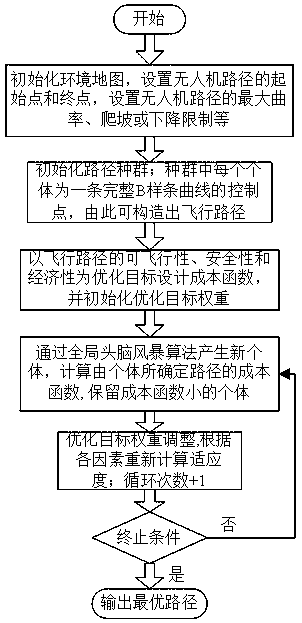
[0043] Such as figure 1 As shown, the present invention proposes a UAV three-dimensional path design method based on the global optimal brainstorming algorithm, and its steps are as follows:
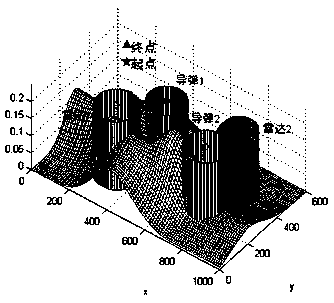
[0044] S1. Initialize the environment map, including: terrain, radar, artillery (missile) and so on. Set the maximum number of iterations to 100, initialize the parameters of the UAV path, including setting the starting point and end point of the UAV path, the coordinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More