

Single-line laser radar obstacle detection method for fully automatic unmanned rail vehicle
A single-line laser radar and rail vehicle technology, applied in the field of remote control and monitoring, can solve the problems of large size, low efficiency, and difficult to use, and achieve the effect of miniaturization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] Example 1: see figure 1 , figure 2 , A single-line lidar obstacle detection method for fully automatic unmanned rail vehicles, the method steps are as follows,
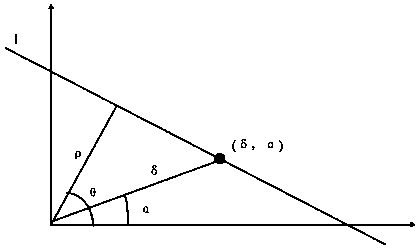
[0036] a. The lidar and the controller are connected through Ethernet, and the UDP protocol is used to send data frames to the controller; the UDP protocol is used to send data frames to the controller at a frequency of 100 Hz, and each frame of data contains 2000 groups of data, one every 0.18° Group, each group of data contains three data of reflection point distance, angle and reflection signal intensity;
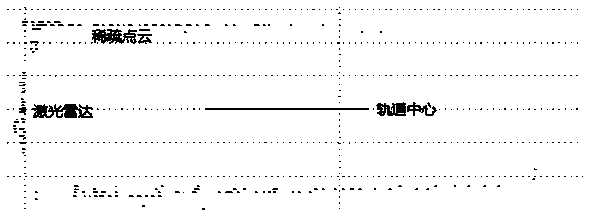
[0037] b. The controller performs dense repetitive data filtering and shaping processing on each frame of data;
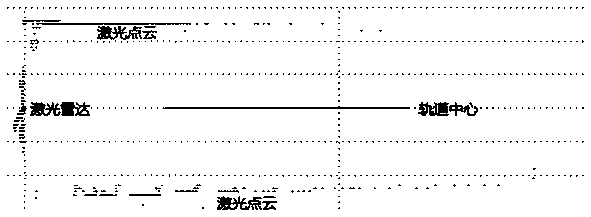
[0038] The characteristic of lidar scanning is that the closer the points are, the denser the points, which leads to a process of dense to sparse points on a straight line from near to far. If dense repetitive data filtering is not performed, the dense points will be sparse, which will lead to close...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More