

An unmanned aerial vehicle real-time detection method used in a dynamic environment
A real-time detection and dynamic environment technology, applied in computer components, image data processing, instruments, etc., can solve the problems of large mutual occlusion, false detection, missed detection, etc., to improve detection accuracy, reduce false detection rate and The effect of missed detection rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
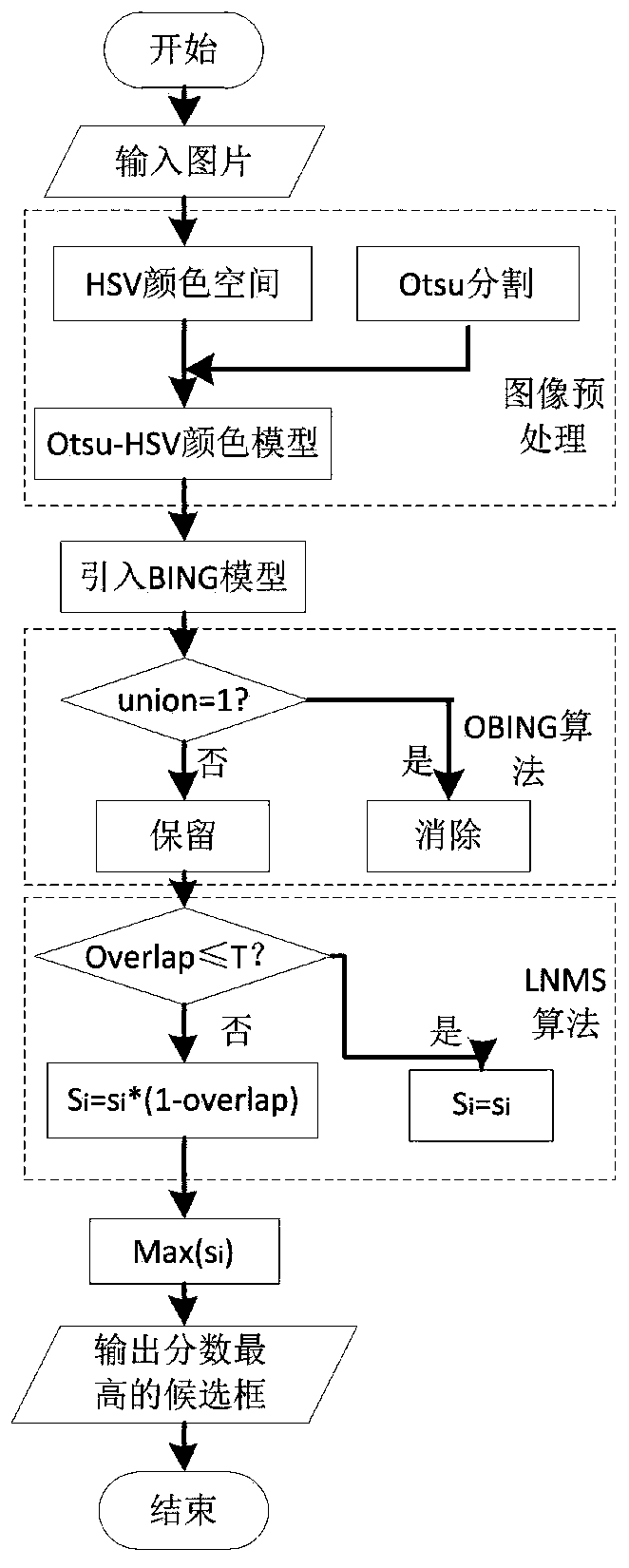
[0047] This embodiment provides a real-time detection method for unmanned aerial vehicles in a dynamic environment, the process is as follows figure 1 As shown, the following steps are included.
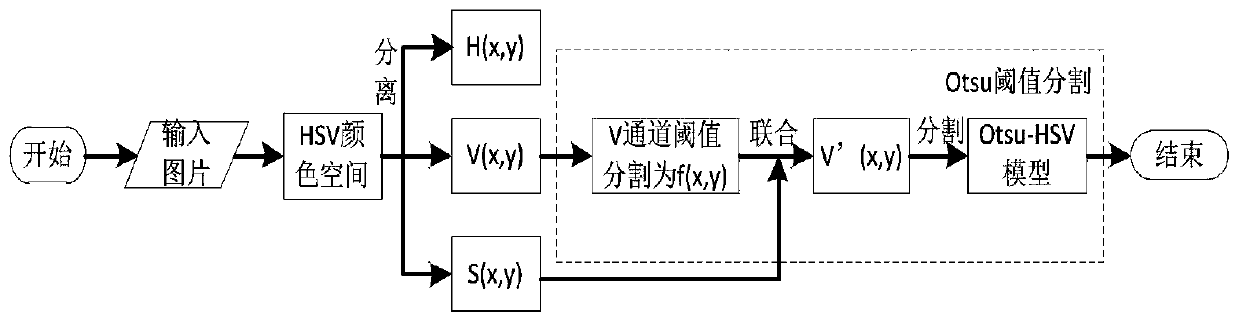
[0048] Step 1: Establish the Otsu-HSV color model, the specific operation is as follows:
[0049] 1. Convert the image from RGB color space to HSV color space;
[0050] 2. Extract the three channel images of H, S, and V, mainly use the V channel information, and use the maximum inter-class variance method for pre-segmentation;
[0051] 3. Further integrate the S channel information to form a new image, and perform a second segmentation on the new image to complete the second segmentation process to form the Otsu-HSV color model.
[0052] The traditional RGB space is composed of three components: red, green, and blue. There is a lot of unnecessary information between each component, which increases the amount of calculation; when performing color separation, it is easy to cause fal...
Embodiment 2
[0091] The algorithm of the present invention is compared with the UAV detection performance in the Otsu-HSV color model and the GRAY, RGB and HSV color spaces respectively. As shown in Table 1, the average accuracy rate and the best overlap rate of the Otsu-HSV color model are in the four colors It is the highest in the space, and its values are 97.15% and 67.25% respectively. This is because when the gray level overlaps between the target and the background, the maximum inter-class variance method is used in the HSV color space to solve the gray level change trend in the image. Similar to the problem that the image information cannot be effectively reflected, and the UAV features extracted by the Otsu-HSV color model are more obvious, and the color information is less lost. Compared with other color spaces, it is more conducive to the subsequent detection of UAV targets in the present invention .
[0092] Table 1 Quantitative comparison of the algorithm of the present inve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More