Deicing robot
A technology of robots and airframes, which is applied in the direction of rotorcraft, manipulators, aircrafts, etc., can solve the problems of high risk factor, inconvenient transportation, high labor intensity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
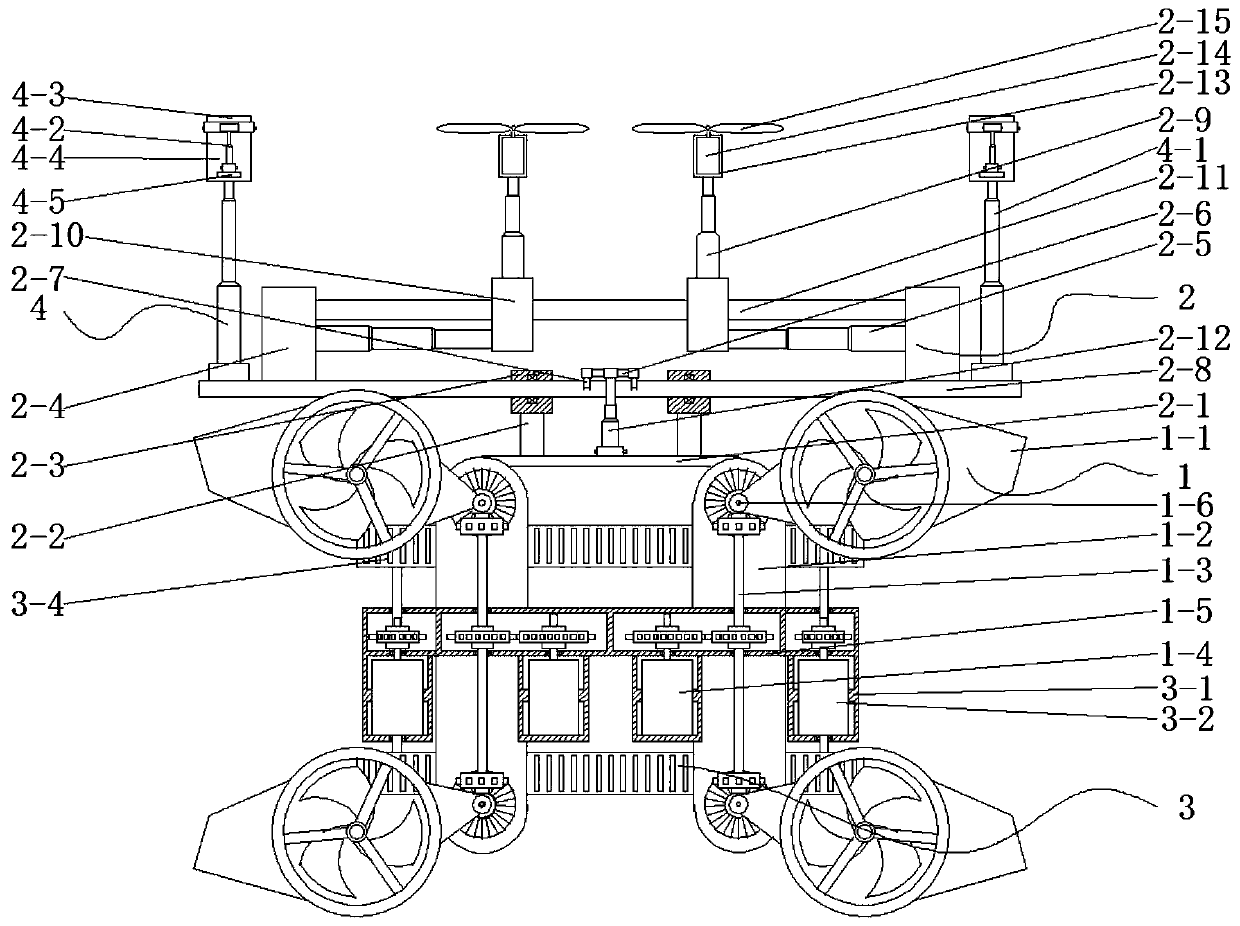
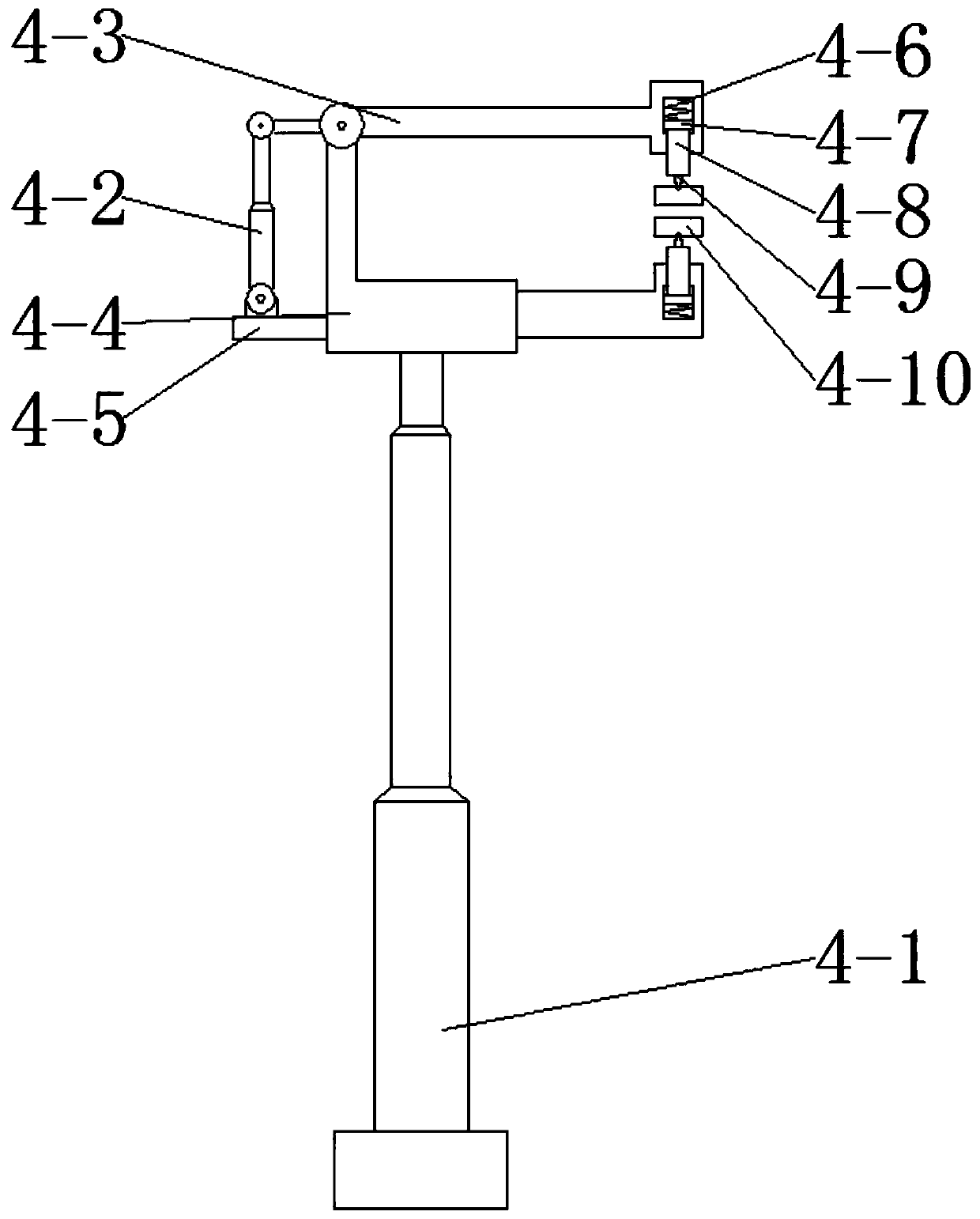
[0036] like figure 1 As shown, a deicing robot includes: unmanned body 1, ice removal device 2, running device 3 and fixing device 4; connected, a plurality of fixing devices 4 are arranged symmetrically on the ice clearing device 2;
[0037] The ice clearing device 2 comprises: a fixed plate 2-1, a fixed rod 2-2, a first fixed block 2-3, a second fixed block 2-4, a first hydraulic cylinder 2-5, a drive shaft 2-6, a drive connection Rod 2-7, connecting rod 2-8, second hydraulic cylinder 2-9, slide block 2-10, slide bar 2-11, third hydraulic cylinder 2-12, motor housing 2-13, drive motor 2-14 and deicing blade 2-15; the fixed plate 2-1 is fixedly connected with the drone body 1, and the fixed plate 2-1 is symmetrically provided with a plurality of fixed rods 2-2, and one end of the fixed rod 2-2 is connected with the fixed plate 2-1 Fixed connection The other end is fixedly connected with a first fixed block 2-3, the inner side of the first fixed block 2-3 is provided with a ...
specific Embodiment approach 2
[0041] combine figure 1, this embodiment is based on the specific implementation mode 1, the difference is that the drone body 1 includes: a drone propeller 1-1, a connecting plate 1-2, a first drive rod 1-3, a first drive Motor 1-4, first housing 1-5 and steering drive rod 1-6; the lower end surface of the housing is symmetrically provided with a plurality of connection plates 1-2, and the lower end surface of the connection plate 1-2 is connected with the fixed plate 2-1 is fixedly connected, the rotation on the connecting plate 1-2 is connected with a plurality of steering drive rods 1-6, and the side of the steering drive rod 1-6 is fixedly connected with a UAV propeller 1-1, and the first housing 1- A plurality of motor installation cavities are symmetrically arranged in the 5, and a first drive motor 1-4 is arranged in the motor installation cavity, and the first drive motor 1-4 is rotationally connected with the interlayer of the motor installation cavity through a bear...
specific Embodiment approach 3
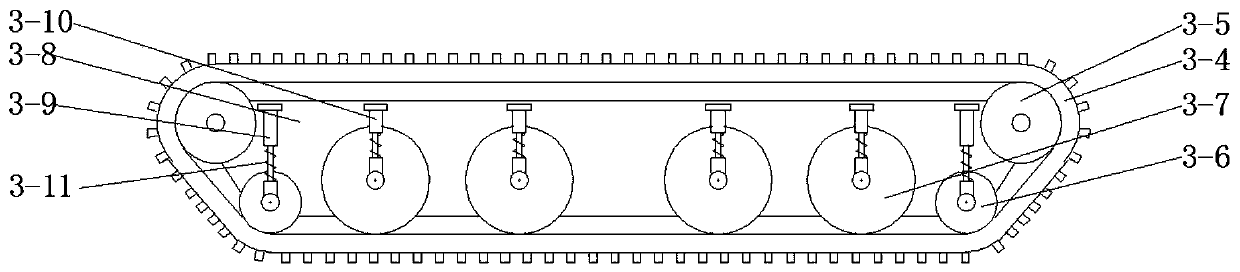
[0044] to combine Figure 1 to Figure 2 , this embodiment is based on the specific implementation mode 1, the difference is that: the traveling device 3 includes: a second housing 3-1, a second driving motor 3-2, a second driving rod 3-3, and a chain rail 3 -4, driving wheel 3-5, first driven wheel 3-6, second driven wheel 3-7, mounting plate 3-8, first telescopic link 3-9, second telescopic link 3-10 and spring 3- 11. Two second shells 3-1 are symmetrically welded on both sides of the first shell 1-5, and each second shell 3-1 is provided with a motor installation cavity, and a second motor installation cavity is provided in the motor installation cavity. The drive motor 3-2, the main shaft of the second drive motor 3-2 runs through the outer wall of the motor installation cavity, the second drive motor 3-2 is rotationally connected with the second housing 3-1 through the bearing, and the second drive motor 3-2 passes through The gear mechanism is connected with the second d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More