

Surrounding flight control method and device, terminal and storage medium
A control method and controller technology, applied in the field of unmanned aerial vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
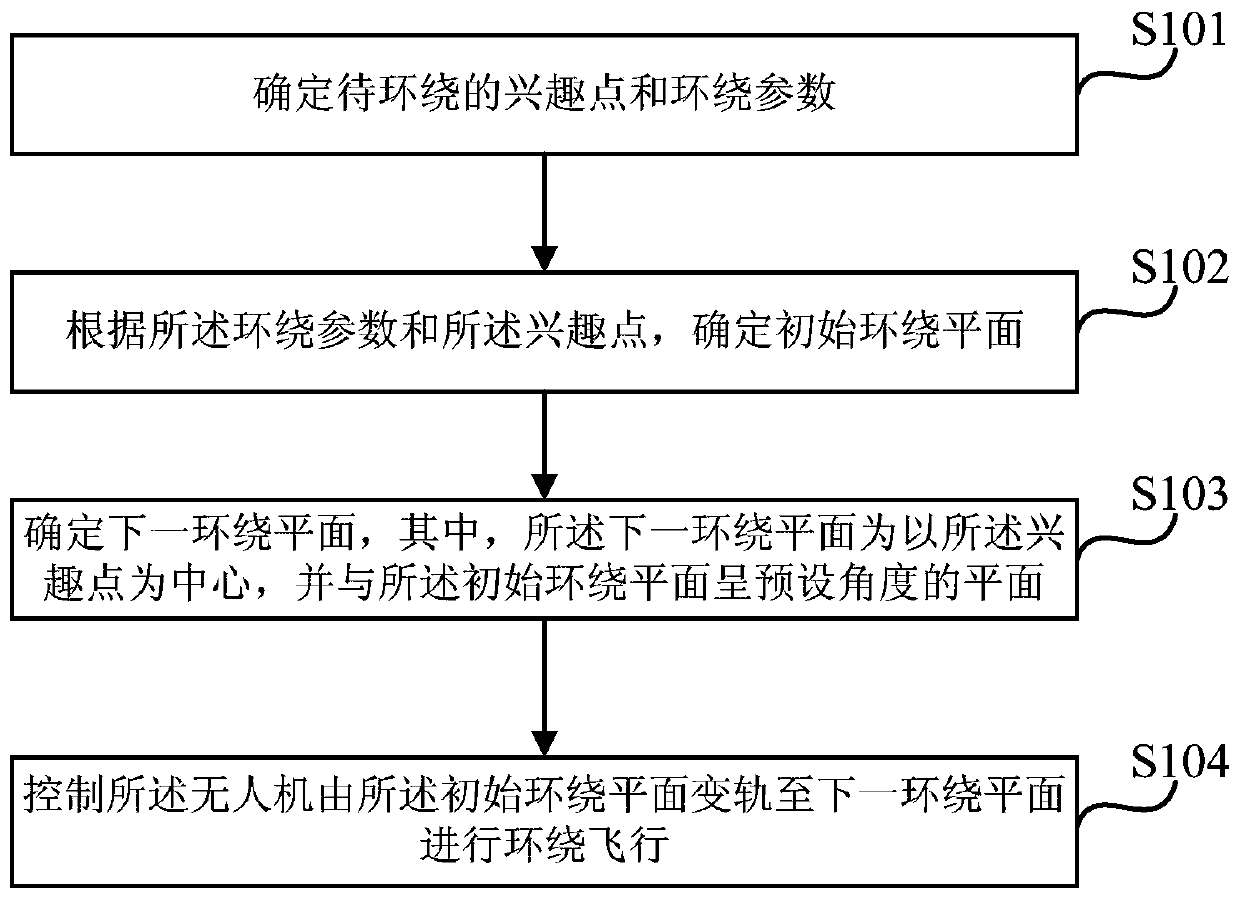
[0057] Figure 1a It is a schematic flow chart of a control method for flying around a point of interest provided by Embodiment 1 of the present invention. This method is applicable to the situation where the UAV is controlled to fly around a point of interest. This method can be controlled by the control device for flying around in the embodiment of the present invention. To execute, the device can be implemented in the form of software and / or hardware, and specifically can be integrated in the drone.
[0058]It should be noted that the method provided by the embodiment of the present invention specifically relates to consumer-grade drone products for intelligent aerial photography. The consumer-grade drone products are drones used for flying aerial photography. The functional program is used to enable the drone to fly autonomously through the integrated functional program, so the execution subject of the method provided by this embodiment can be the drone.
[0059] Simultane...
Embodiment 2
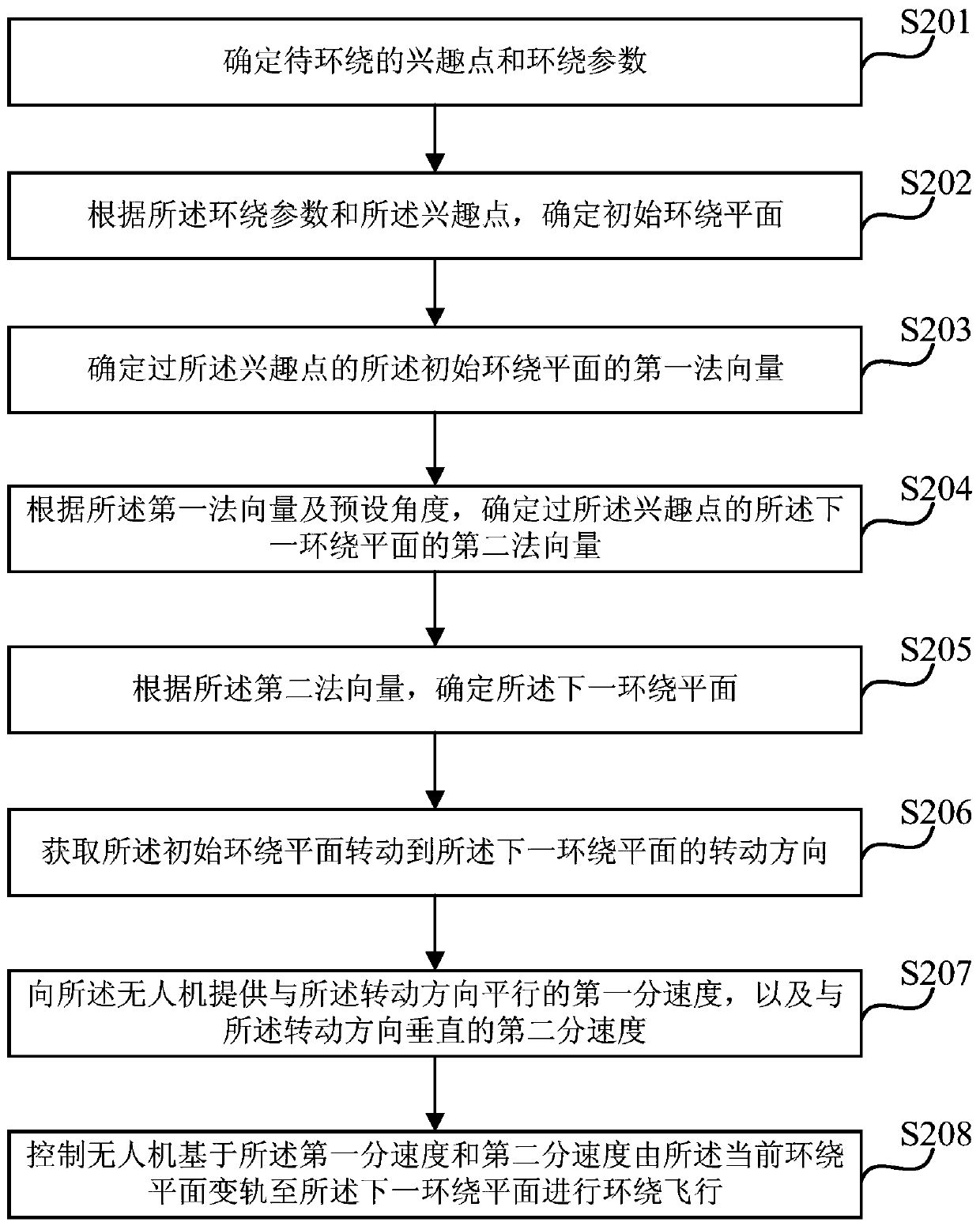
[0080] Figure 2a It is a schematic flow chart of a control method for orbiting flight provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments. In this embodiment, the determination of the next orbiting plane is further embodied as: determining The first normal vector of the initial surrounding plane passing the interest point; according to the first normal vector and the preset angle, determine the second normal vector of the next surrounding plane passing the interest point; according to the The second normal vector is used to determine the next surrounding plane.
[0081] In addition, this embodiment will control the UAV to change orbit from the initial orbital plane to the next orbital plane to perform orbital flight, which is further embodied as: obtaining the rotation from the initial orbital plane to the next orbital plane the direction of rotation; provide the UAV with a first sub-speed parallel t...
Embodiment 3
[0110] image 3 A structural block diagram of a control device for orbiting flight provided by Embodiment 3 of the present invention, which is applicable to the situation where the UAV is controlled to fly around a point of interest. This method can be controlled by the control device for orbiting flight in the embodiment of the present invention To execute, the device can be implemented in the form of software and / or hardware, and specifically can be integrated in the drone. Such as image 3 As shown, the device includes: an initial information determination module 31 , a first plane determination module 32 , a second plane determination module 33 , and a flight control module 34 .
[0111] Wherein, the initial information determination module 31 is used to determine the interest point to be surrounded and the surrounding parameters, wherein the surrounding parameters include the surrounding radius, the surrounding direction and the surrounding speed;
[0112] The first pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More