

An experimental platform for exoskeleton joints driven by pneumatic muscles
A technology of pneumatic muscles and experimental platforms, applied in the direction of measuring devices, instruments, etc., can solve the problems that cannot meet the two-way motion of human joints, and achieve the effect of simple and reliable control process, large output pulling force and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, on the premise of no conflict, the various embodiments or technical features described below can be combined arbitrarily to form new embodiments.
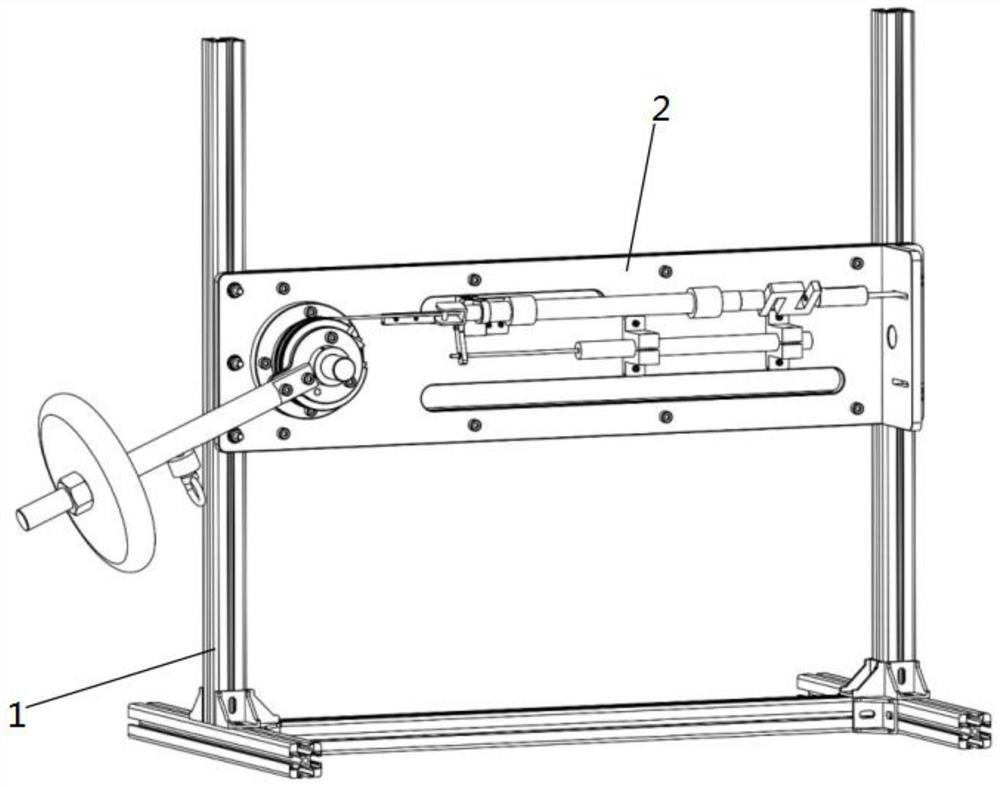
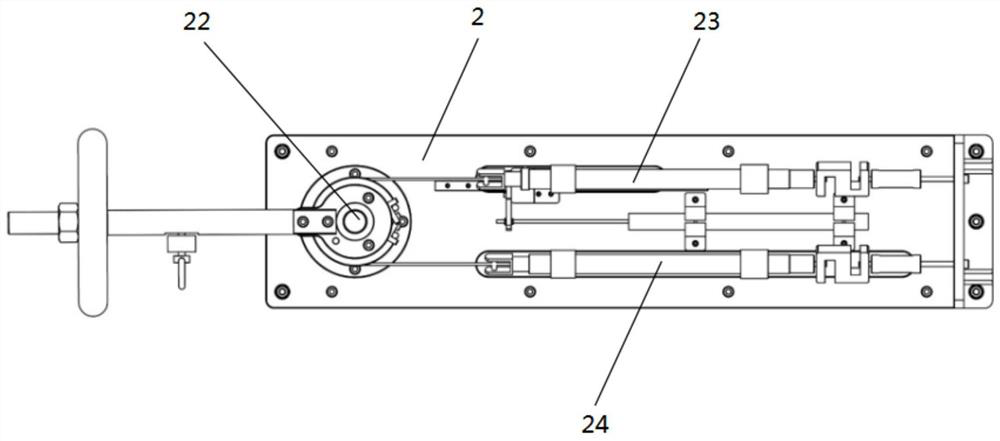
[0050] Such as figure 1 , figure 2 , Figure 4 As shown, an exoskeleton joint experiment platform driven by a pneumatic muscle 2432 according to the present invention includes a support 1 and a working platform 2 installed on the support 1, and the working platform 2 includes a joint assembly 22, a pneumatic muscle assembly 23. The test collocation component 24, the joint component 22, the pneumatic muscle component 23 and the test collocation component 24 are all installed on the working platform 2, and the pneumatic muscle component 23 cooperates with the test collocation component 24 to drive the joint component 22 to rotate;
[0051] The joint assembly 22 inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More