

AUV energy optimization path searching method based on distance evolution N-PSO
An energy optimization and path technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems such as unavailability, unstable results, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
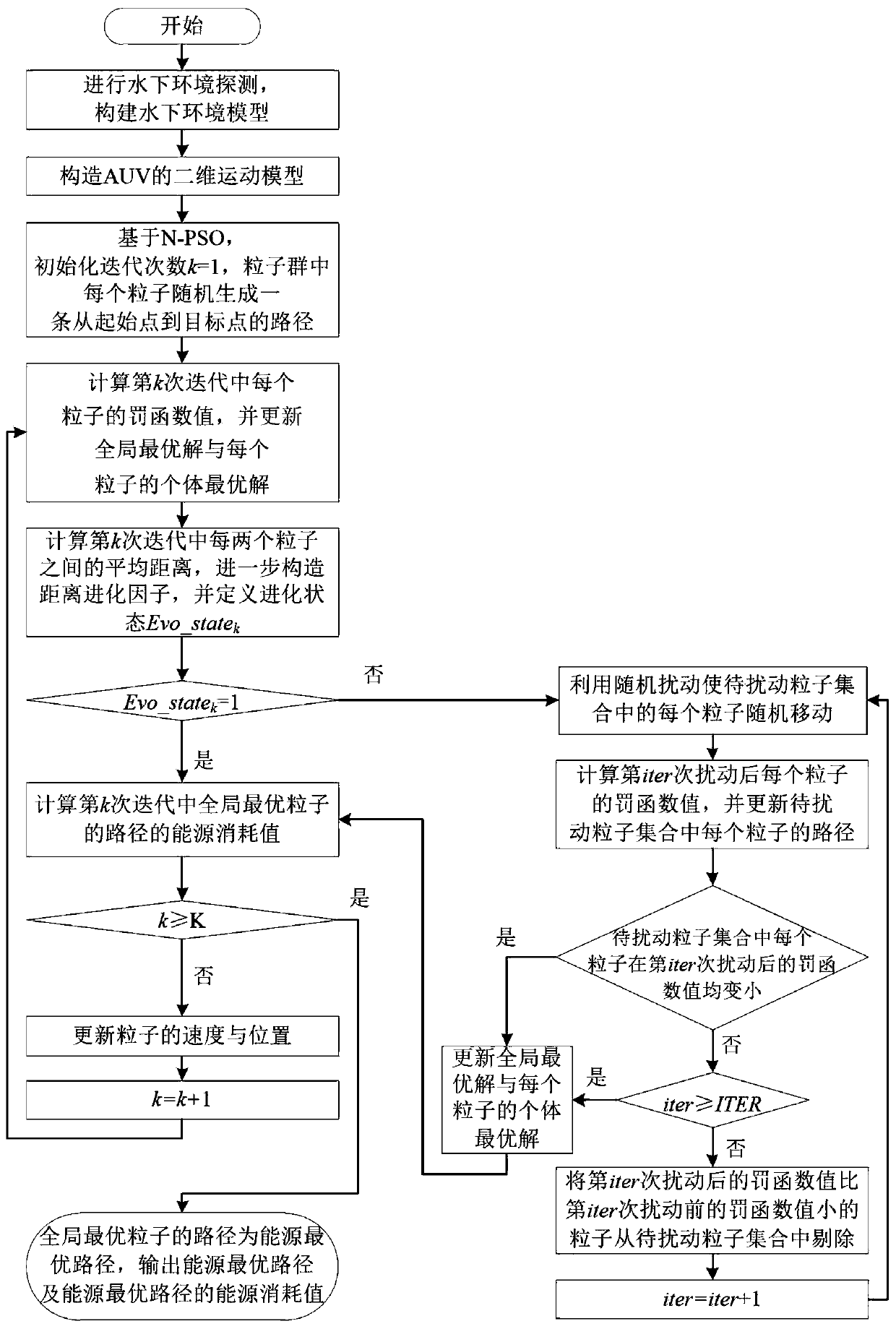
[0059] Such as figure 1 As shown, it is a flow chart of the AUV energy optimization path search method based on distance evolution N-PSO in the present invention. The AUV energy optimization path search method based on distance evolution N-PSO of the present invention is characterized in that, comprises the following steps:
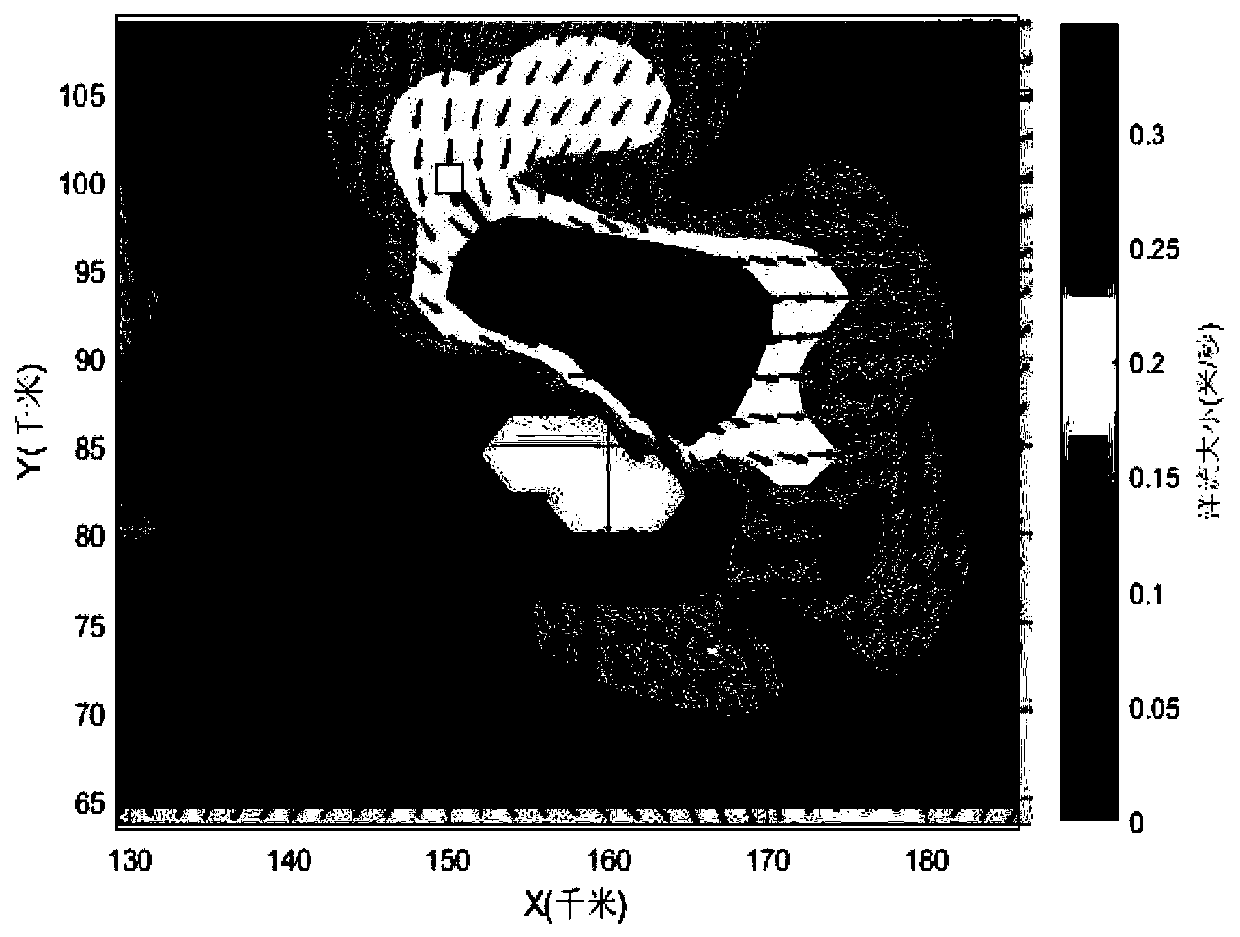
[0060] Step 1: Detect the underwater environment in the regional sea space to obtain eddy current and obstacle information; divide the underwater environment into Q layers in vertical height, establish a two-dimensional rectangular coordinate system xOy in each layer, and build an underwater environment model , to determine the starting point p of the AUV to perform the task 1 with the target point p n ; The underwater environment model includes a vortex field model and an obstacle model, and the vortex field model is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More