Acceleration-based follow-up vehicle control method
A control method and technology of following cars, which are applied in the control of finding targets, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of poor following effect of the following cars, and achieve a good motion control scheme. , Small computational workload, ensuring the effect of the follow-up effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
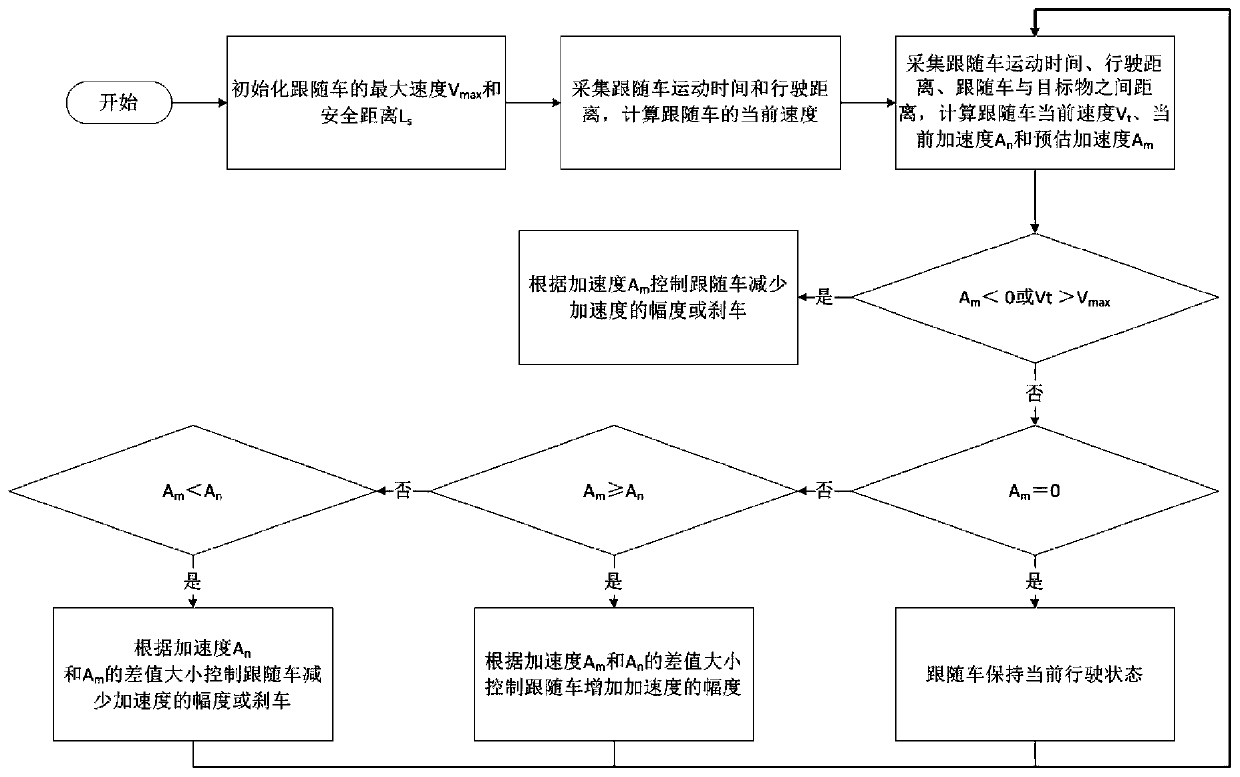
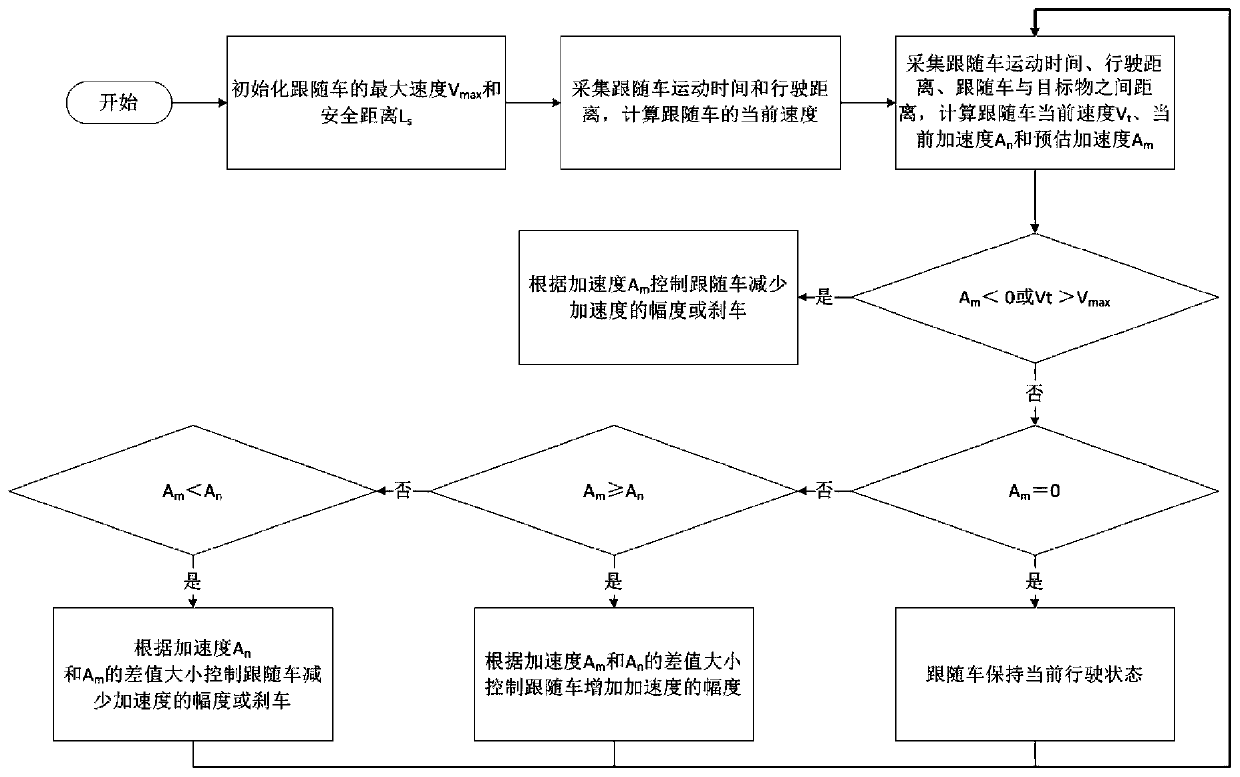
[0044] An acceleration-based following car control method provided by a preferred embodiment of the present invention, such as figure 1 with 2 shown, including the following steps:
[0045] Step 1: Set the safe distance L between the base station of the following vehicle and the target tag s , the maximum speed V of the following car max and shorten the distance between the base station of the following vehicle and the target tag to a safe distance L s The time shortening amount T v , to initialize the historical velocity V 0 , the current speed V t and the acquisition count i=0.
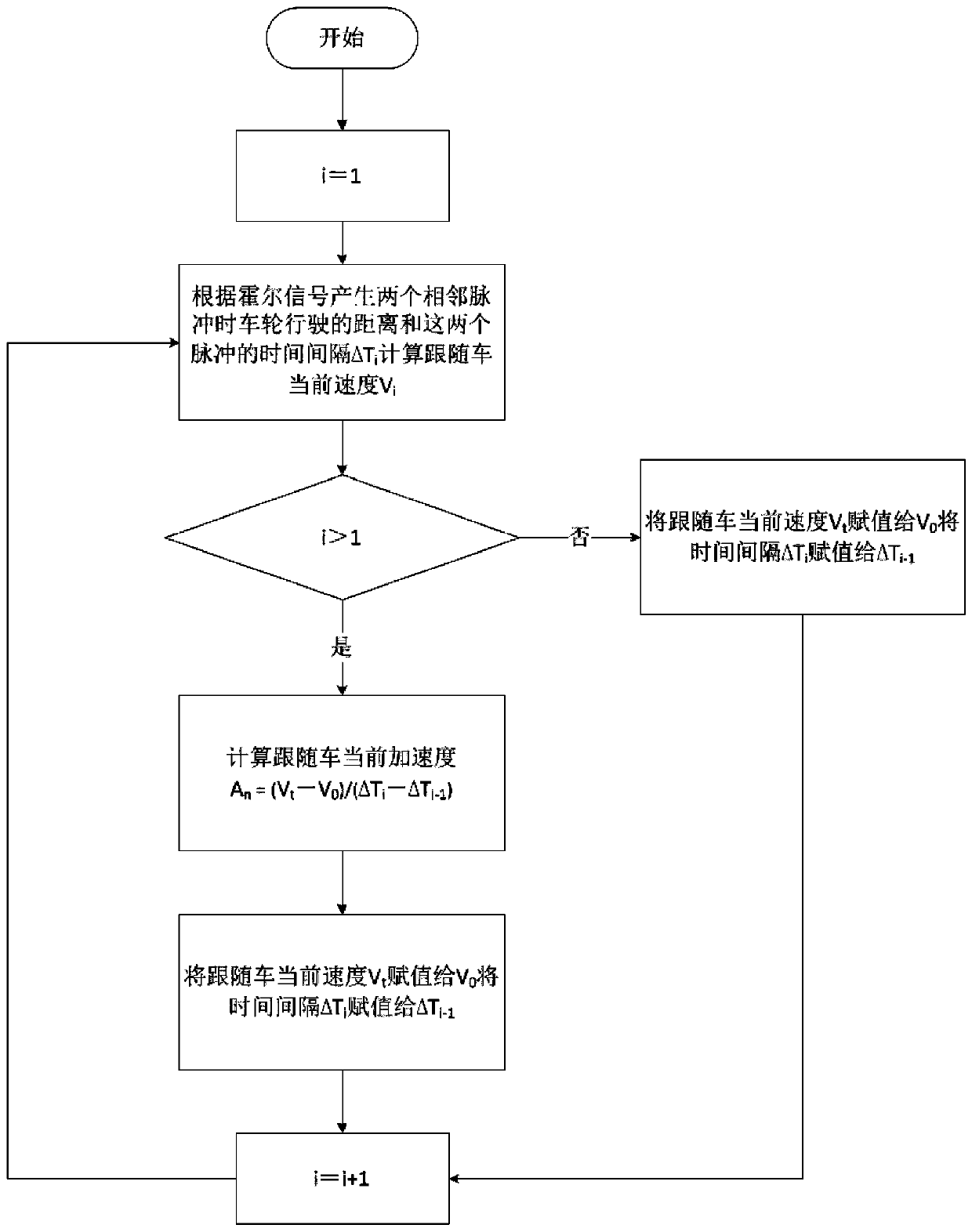
[0046] Step 2: Set the number of acquisitions i=1, and acquire the following vehicle passing through ΔT i Current speed after time interval; ΔT i Indicates the time when the Hall signal generates two adjacent pulses. When the Hall signal generates two adjacent pulses, the distance traveled by the following vehicle is a fixed value S. details as follows:
[0047] Acquire the driving data Δ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com