

A control method for anti-crosswind landing of flying-wing UAV with small aspect ratio
A technology with small aspect ratio and control method, applied in attitude control, control/adjustment system, non-electric variable control, etc., can solve the problem of weak heading control ability, difficulty in quickly aligning the nose with the runway, and unsatisfactory crosswind landing process etc. to achieve high feedback gain, increased control accuracy and rapid response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
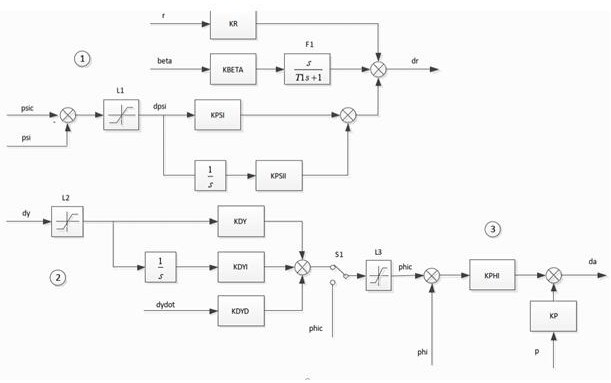
[0025] like figure 1 As shown in the figure, a control method for anti-crosswind landing of a flying-wing UAV with a small aspect ratio is characterized by comprising the following steps:
[0026] a, Heading stabilization and control, the difference between heading stabilization and general heading stabilization is that the feedback from the sideslip angle to the resistance rudder has a cleaning network F1, and sideslip is introduced in the flight control to eliminate the adverse control effects caused by the coupled signal , in the feedback process, the cleaning network is applied to filter the signal, and the formula is as follows:
[0027] Dr=K r *r+F1*K β *β+[K ψ *△ψ+K ψ’ *∫△ψdt]
[0028] Among them, Dr: rudder out of rudder, r: yaw angle rate, β: sideslip angle, ψ: yaw angle, F1: cleaning network, filter architecture is s / (Ts+1), K: control parameter, △ψ : The difference between the yaw angle and the given value.
[0029] b, Lateral deviation control, using PID con...
Embodiment 2
[0043] A control method for anti-crosswind landing of a flying-wing UAV with a small aspect ratio, which is characterized by comprising the following steps:
[0044] a, Heading stabilization and control, the difference between heading stabilization and general heading stabilization is that the feedback from the sideslip angle to the resistance rudder has a cleaning network F1;
[0045] working process:
[0046]Brief description of control mechanism: UAV with flying-wing layout is statically unstable in lateral heading control in terms of body characteristics. Because there is no vertical tail, it cannot fly downwind after being disturbed by wind, and the aircraft moves in reverse, so sideslip is introduced in flight control. , to enhance the robustness of the aircraft. At the same time, due to the differential control of multiple rudder surfaces of the aircraft, there is coupling in the control signal. In order to eliminate the adverse control effect caused by the coupled sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More