

A Model-Free Adaptive Smooth Sliding Mode Impedance Control Method for Parallel Robot String Fruit Gripping
A model-free self-adaptive, impedance control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of not considering the influence of the dynamic characteristics of the clamping mechanism on the control performance of fruit grasping, and avoid online real-time calculation. , Improve performance and achieve the effect of non-destructive clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
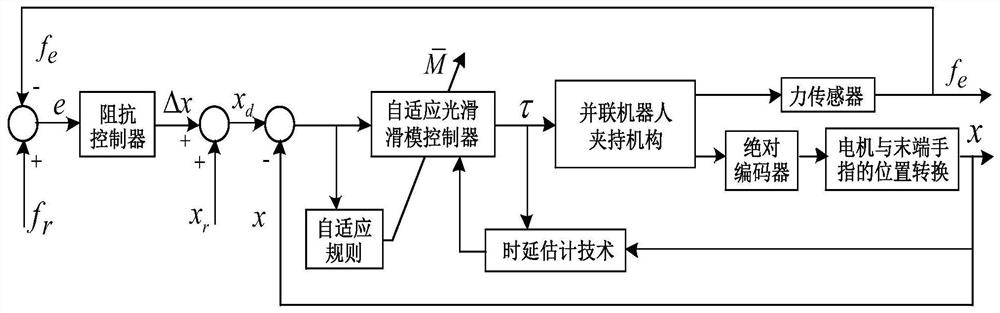
[0113] Aiming at the problem of non-destructive gripping of string fruits by parallel robots, the present invention proposes a model-free adaptive smooth sliding mode impedance control method, which does not need to establish a mathematical model of the parallel robot gripping mechanism, and has the ability to control mechanism movement and load changes Self-adaptive, it can well realize the non-destructive gripping of string fruits by parallel robots. The schematic diagram of model-free adaptive smooth sliding mode impedance control for parallel robot string fruit gripping is shown in Fig. figure 2 As shown, the specific implementation of the control method is as follows:
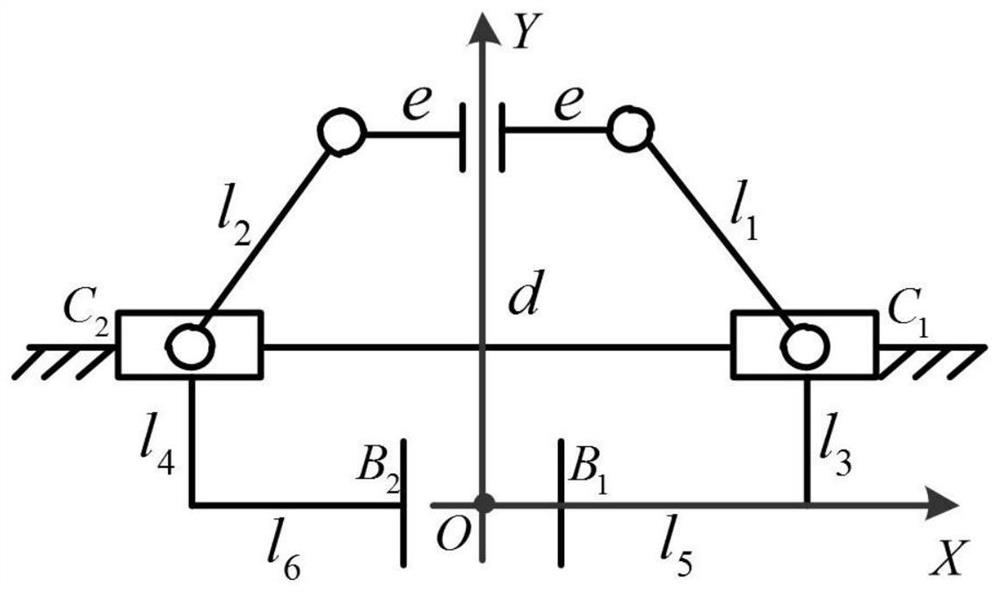
[0114] 1. Solve the relationship between the rotation angle of the active joint screw and the position conversion relationship of the clamping finger of the clamping mechanism
[0115] exist figure 2 In , the length constraint equation of the driven rod is used, and the kinematic equation of the mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More