

Adaptive variable impedance control method for clamping mechanism of fruit sorting parallel robot
A clamping mechanism and control method technology, applied in the field of agricultural parallel robot control, can solve problems such as inability to adapt to changes in fruit quality and position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
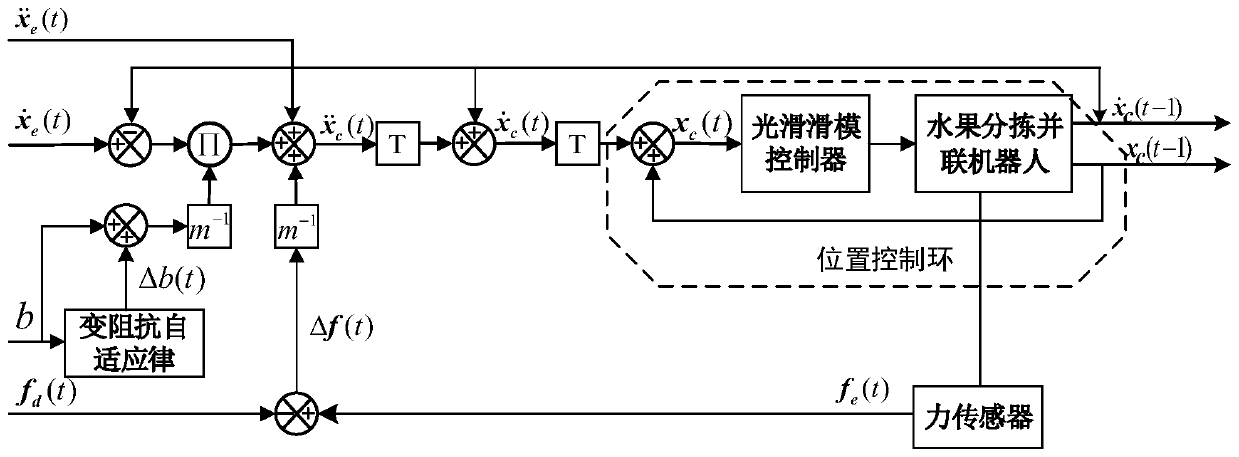
[0111] Aiming at the problem of non-destructive clamping of string fruits by the clamping mechanism of the fruit sorting parallel robot, the present invention proposes an adaptive variable impedance control method for the clamping mechanism of the fruit sorting parallel robot. The method needs to establish a fruit sorting parallel robot clamp The mathematical model of the holding mechanism improves the adaptability of the system to changes in the clamping speed and clamping load, and at the same time improves the performance of impedance control, which can well realize the non-destructive clamping of string fruits by the fruit sorting parallel robot. The schematic diagram of the self-adaptive variable impedance control of the clamping mechanism of the fruit sorting parallel robot is shown in Fig. figure 2 As shown, the specific implementation of the control method is as follows:
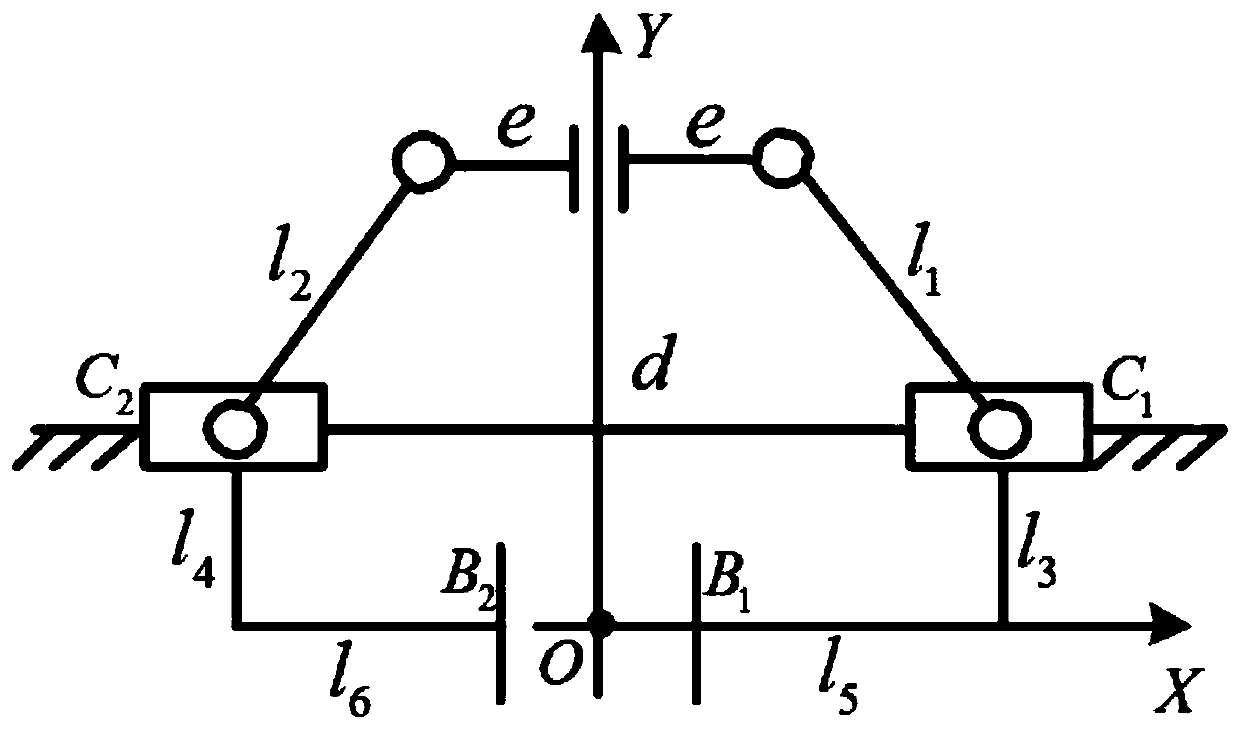
[0112] 1. Solve the relationship between the rotation angle of the active joint screw and the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More