

Improved ant colony algorithm based mobile robot path planning method
A mobile robot, ant colony algorithm technology, applied in the direction of instrument, calculation, calculation model, etc., can solve the problems of slow convergence speed, poor stability of optimization results, etc., to achieve the effect of improving efficiency and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
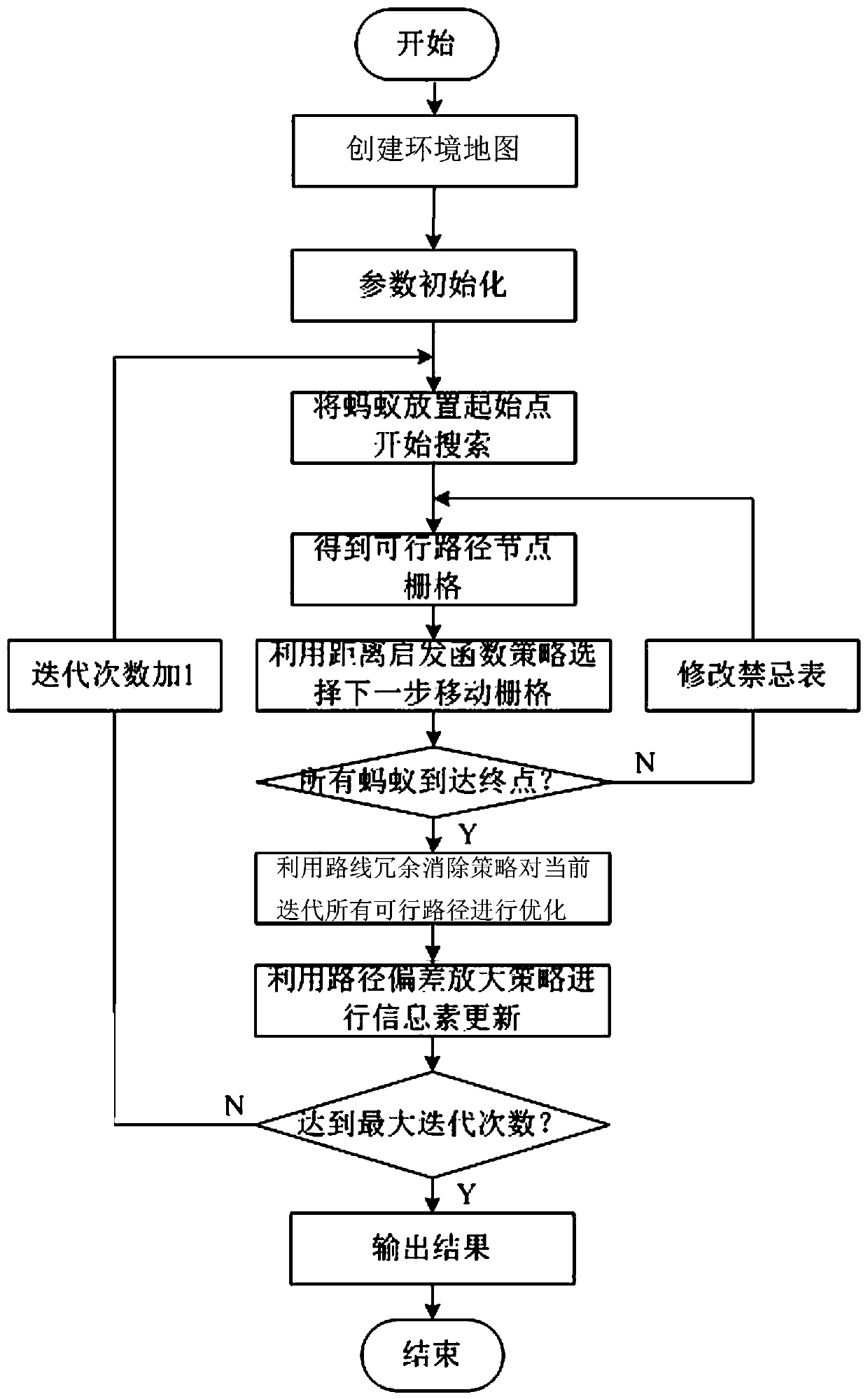
[0048] Such as figure 1 As shown, the present invention provides a mobile robot path planning method based on the improved ant colony algorithm, comprising the following steps:
[0049] S1. Use the grid method to create a map of the robot's working environment, and define the starting point and target point;
[0050] S2. Using the ant colony algorithm to find the shortest path in the environment, the ant colony algorithm includes the following steps:
[0051] S21. Initialize the parameters of the ant colony algorithm;
[0052] S22. Put m ants on the starting point, add the starting point into the taboo table, start searching, and obtain the feasible path node grid;
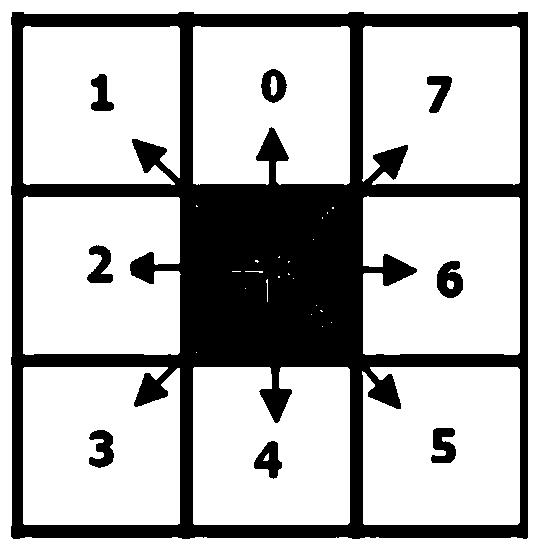
[0053] S23. Each ant selects the next step to move the grid according to the formula (1), and adds the current grid to the taboo table;
[0054]
[0055] In formula (1), s is the current location node with transition probability, Select the transition probability of position node j for ant k at position no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More