

Flow field based intelligent robot obstacle-avoiding method
A technology of intelligent robots and mobile robots, which is applied in the direction of instruments, target-finding control, position/direction control, etc., can solve problems such as local extremum and oscillation, and achieve the effects of smooth path, good motion planning, and high solution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
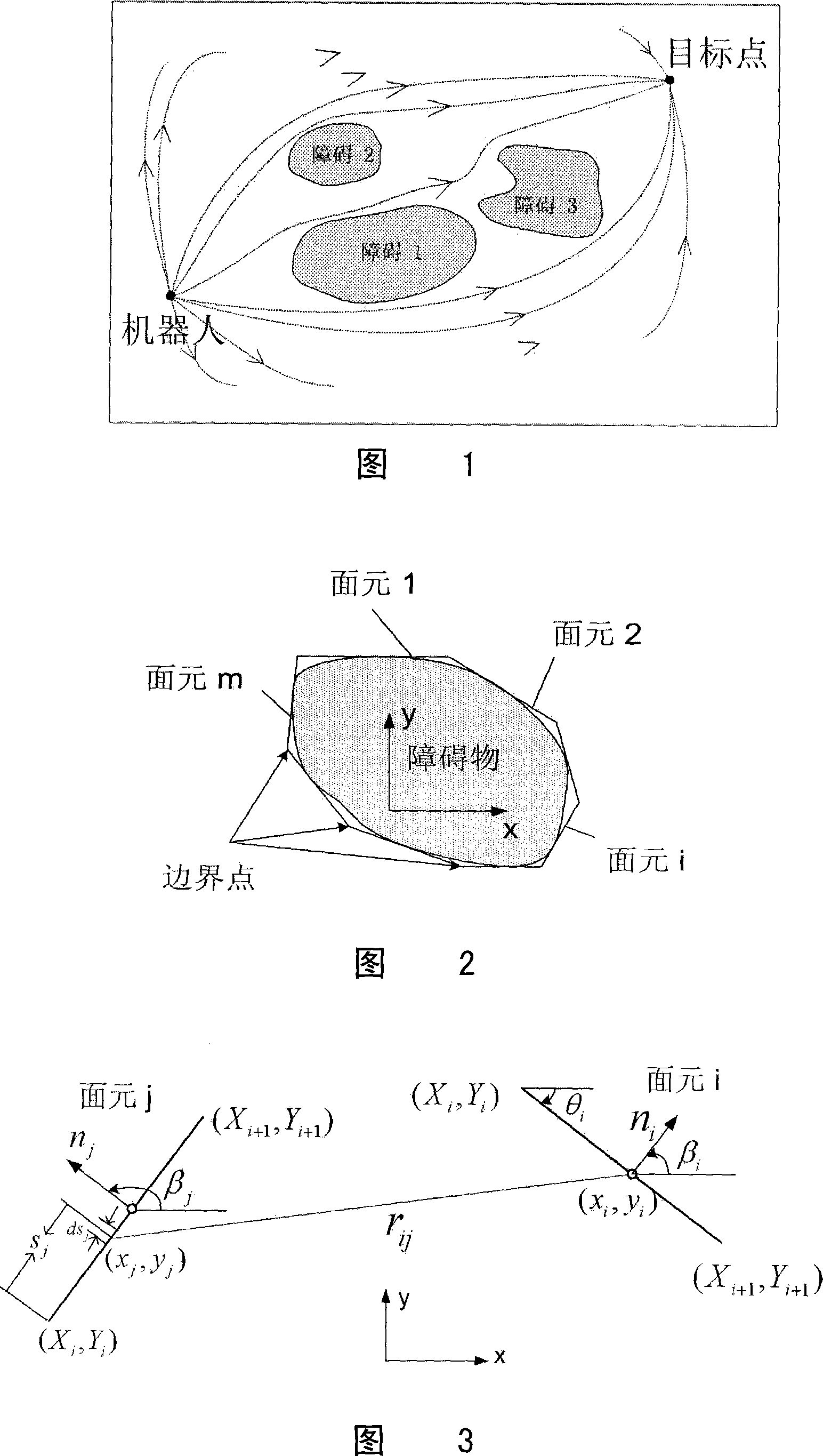
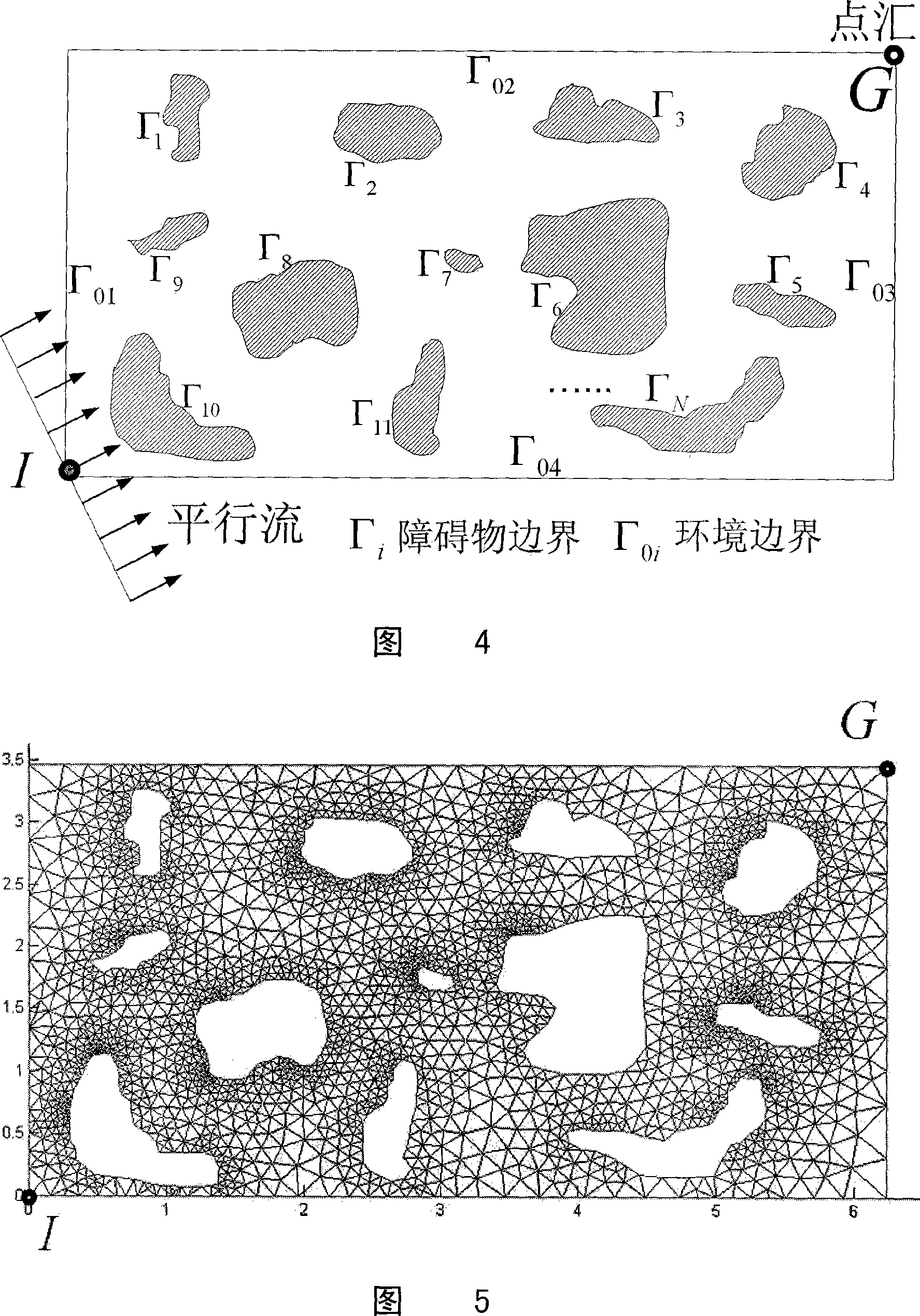
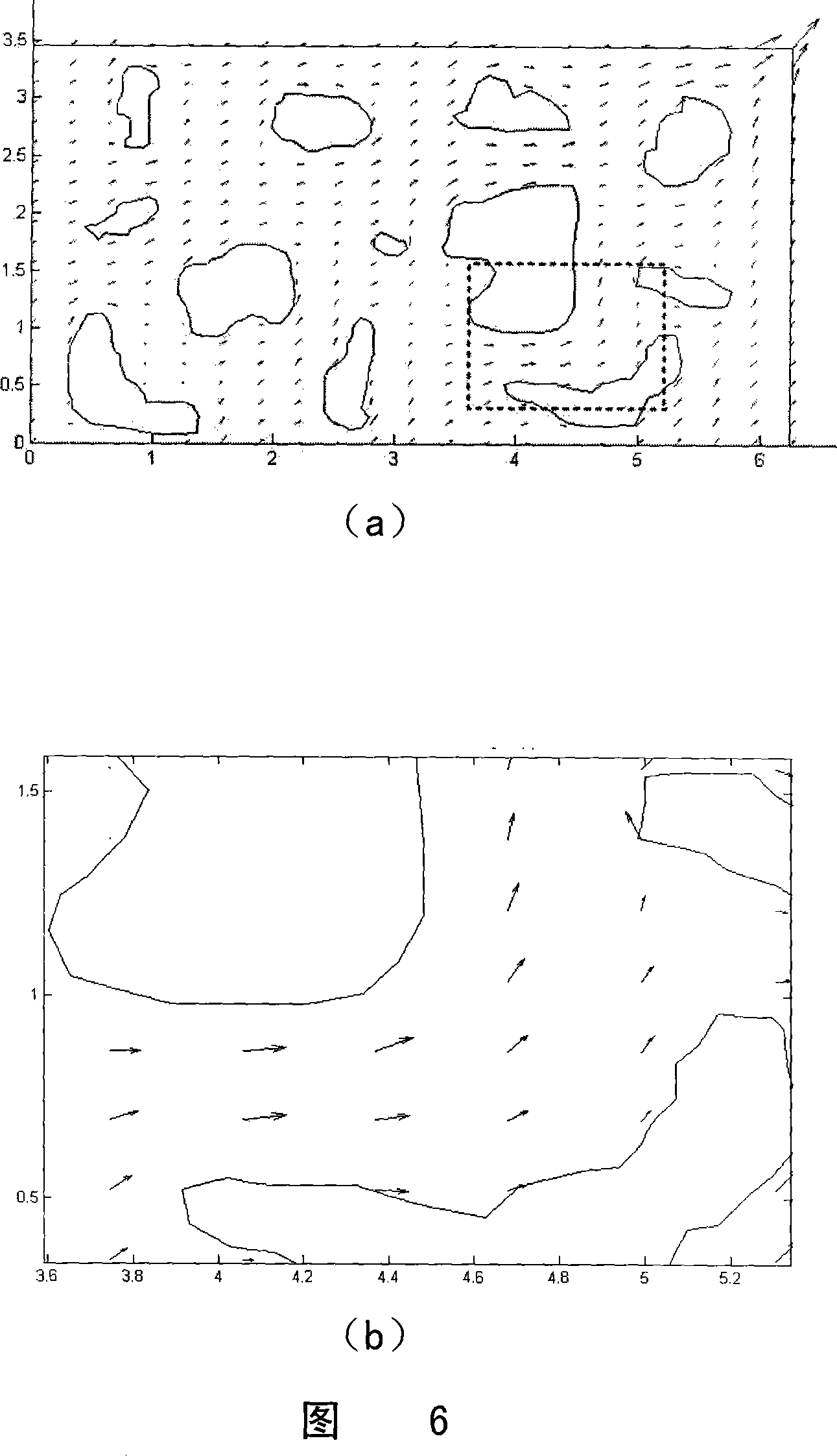
[0025] As shown in Figure 1, the surface element method is a method used in fluid mechanics to solve the problem of flowing around objects of arbitrary shape. This method covers the surface of the object under study with a limited number of small areas, which are called surfaces. Elements, and a certain singular point of undetermined strength is arranged on each surface element. The effect of arranging these singular points is to deflect the flow in the future so that the fluid flows along the surface of the object. Using the condition that the fluid velocity must be tangent to a specific position on each surface element, a set of equations can be obtained, which can be used to solve The strength of the singularity on the surface element, the synthetic flow field can be determined after the singularity distribution is obtained. Taking a planar proble...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More