

A cooperative control method for UAV-unmanned vehicle joint formation
A collaborative control and unmanned aerial vehicle technology, applied in the direction of vehicle position/route/height control, control/adjustment system, non-electric variable control, etc., can solve the problem of increasing the difficulty of formation controller design, high real-time performance of formation controller, Large steady-state error and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
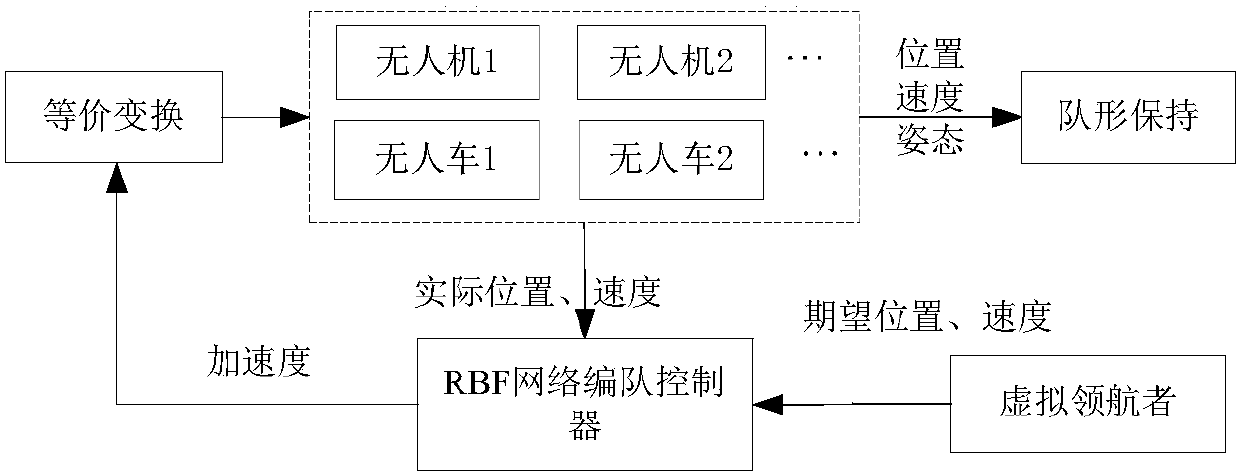
[0055] The invention proposes a design method of an adaptive formation controller based on RBF network. Such as figure 1 As shown, the equivalent transformation of the nonlinear dynamic model of the UAV and the unmanned vehicle is deduced in detail, and a unified formation control model with acceleration as the control input is established. Using the virtual leader method, the error model between the virtual UAV and the following UAV is established, and an adaptive controller for UAV-UV joint formation based on the RBF network is designed, and the sigmoid function and the tanh function are used online Adjust the network weights so that the tracking error of the formation quickly approaches zero. Specifically include the following steps.
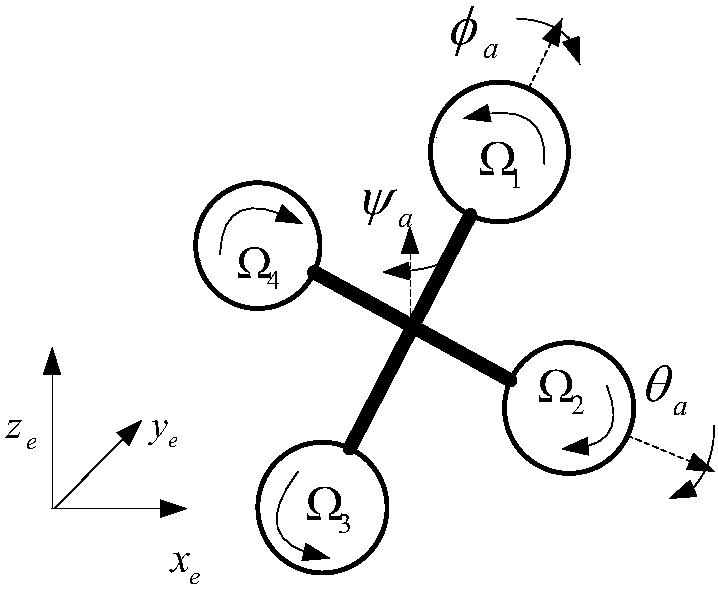
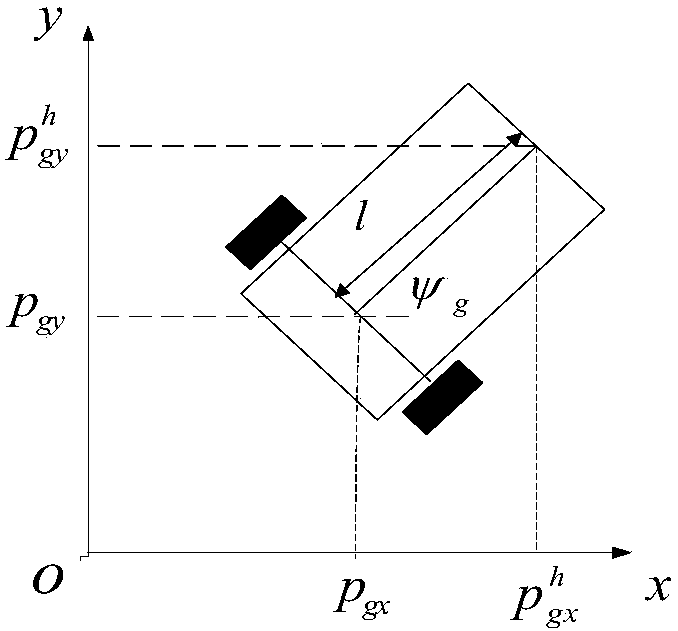
[0056] 1. First establish the nonlinear dynamic mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More