

Method and system for generating 3D point cloud map based on one-line lidar
A technology of laser radar and three-dimensional point cloud, which is applied in the direction of radio wave measurement system, electromagnetic wave re-radiation, instruments, etc., can solve the problems of time discount for drawing maps, very high motor precision requirements, and raise the threshold of technology, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
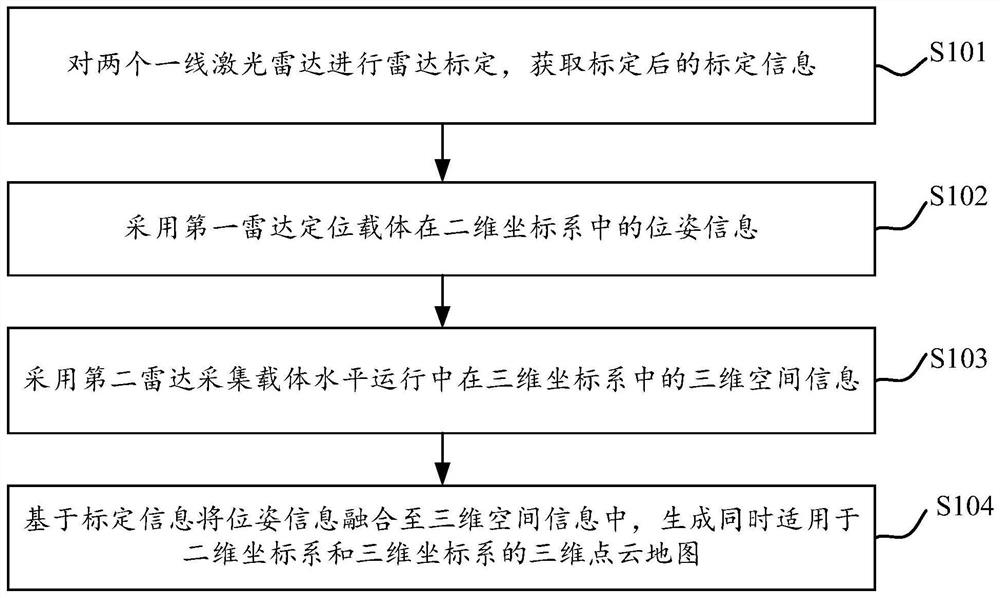
[0042] The 3D point cloud map generation method based on the one-line lidar provided by the embodiment of the present invention can be applied to the application scenario of generating a map for the navigation and positioning of a robot equipped with different sensors, taking into account the price cost and technical cost.
[0043] It should be noted that the terms "comprising" and "having" in the specification and claims of the present application and the above-mentioned drawings, as well as any variations thereof, are intended to cover non-exclusive inclusion, for example, including a series of steps or units A process, method, system, product or device is not necessarily limited to those steps or elements explicitly listed, but may include other steps or elements not explici...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More