Workpiece positioning method and system based on active binocular vision technology
A technology of binocular vision and positioning method, which is applied in computer components, image data processing, complex mathematical operations, etc., can solve the problems of difficult feature point stereo matching and low workpiece positioning accuracy, and achieve the goal of improving accuracy and calculation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
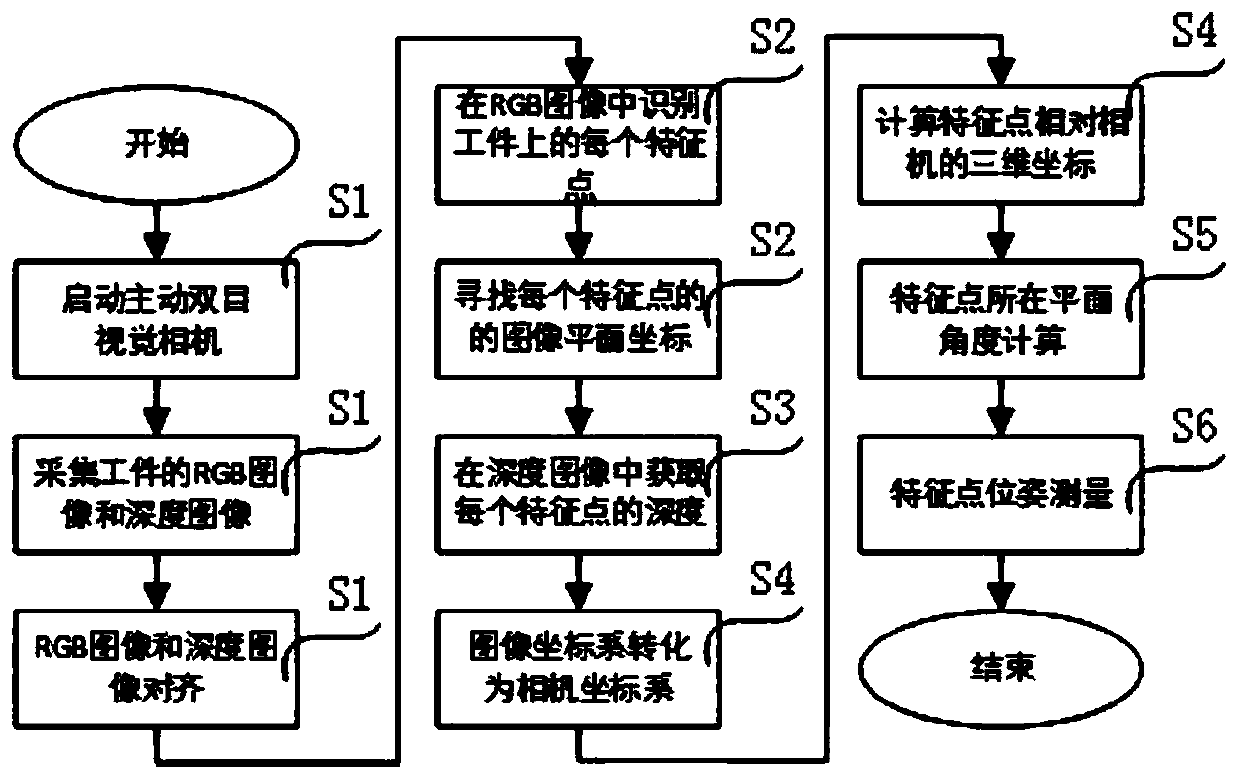
[0044] Please refer to figure 1 , which is a flow chart of a method for workpiece positioning, the present invention proposes a method for workpiece positioning based on active binocular vision technology, comprising the following steps:
[0045] S1. Use an active binocular vision camera equipped with a color camera and a depth camera to acquire a color image and a depth image of a workpiece with several feature points; please refer to Figure 5 , in the implementation process, specifically, identify and locate the 4 bolts on the workpiece.
[0046] S2. In the color image, identify each feature point (bolt) on the workpiece to be positioned, and the plane coordinates of each feature point (bolt) in the color image;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com