

Control method of passive hydraulic knee joint prosthesis
A control method and technology for knee joints, applied in prosthesis, medical science, artificial legs, etc., can solve problems such as high energy consumption, abnormal gait, and inability to change speed, and achieve the effect of reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
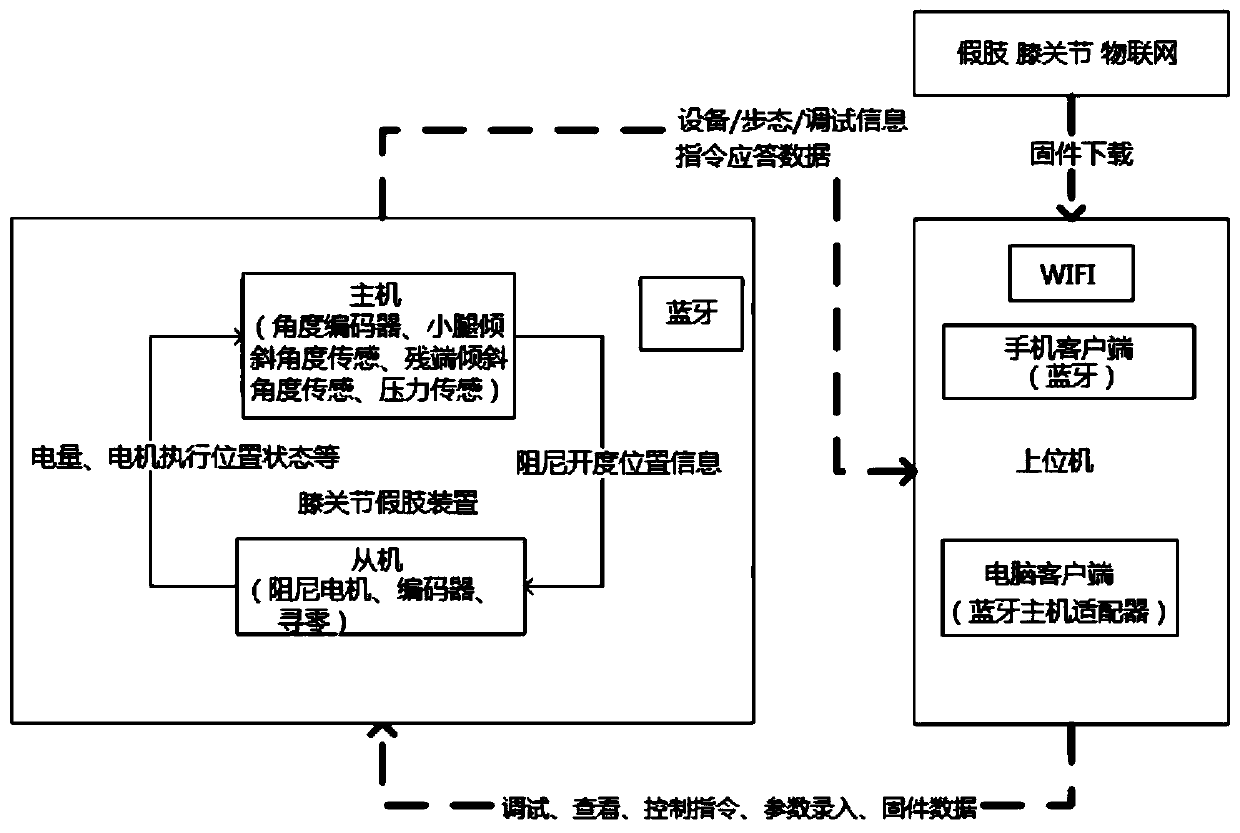
[0015] The entire control system consists of a gait phase recognition module, a road condition recognition module, a pace detection module, and a power detection module. Gait phase recognition is the control basis of the entire control system. Only when different damping controls are performed under specific gait phases can the swing of the prosthetic knee joint conform to the law of the lower limbs of normal people, thus matching the walking on the healthy side. The purpose of road condition recognition is that under different road conditions, the gait of the lower limbs is also different. For the prosthetic knee joint, it is necessary to implement the corresponding gait mode to meet the needs of walking under various road conditions. The pace detection module is used to detect the current walking pace and provide the servo position control system with the target position where the motor needs to run, which is the basis for the realization of the pace adaptive function. The p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More