

Time optimal online trajectory planning method based on S-type velocity planning
A time-optimized and trajectory planning technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as initial acceleration values, and achieve the goal of improving solution efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Preferred embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure can be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the disclosure to those skilled in the art.
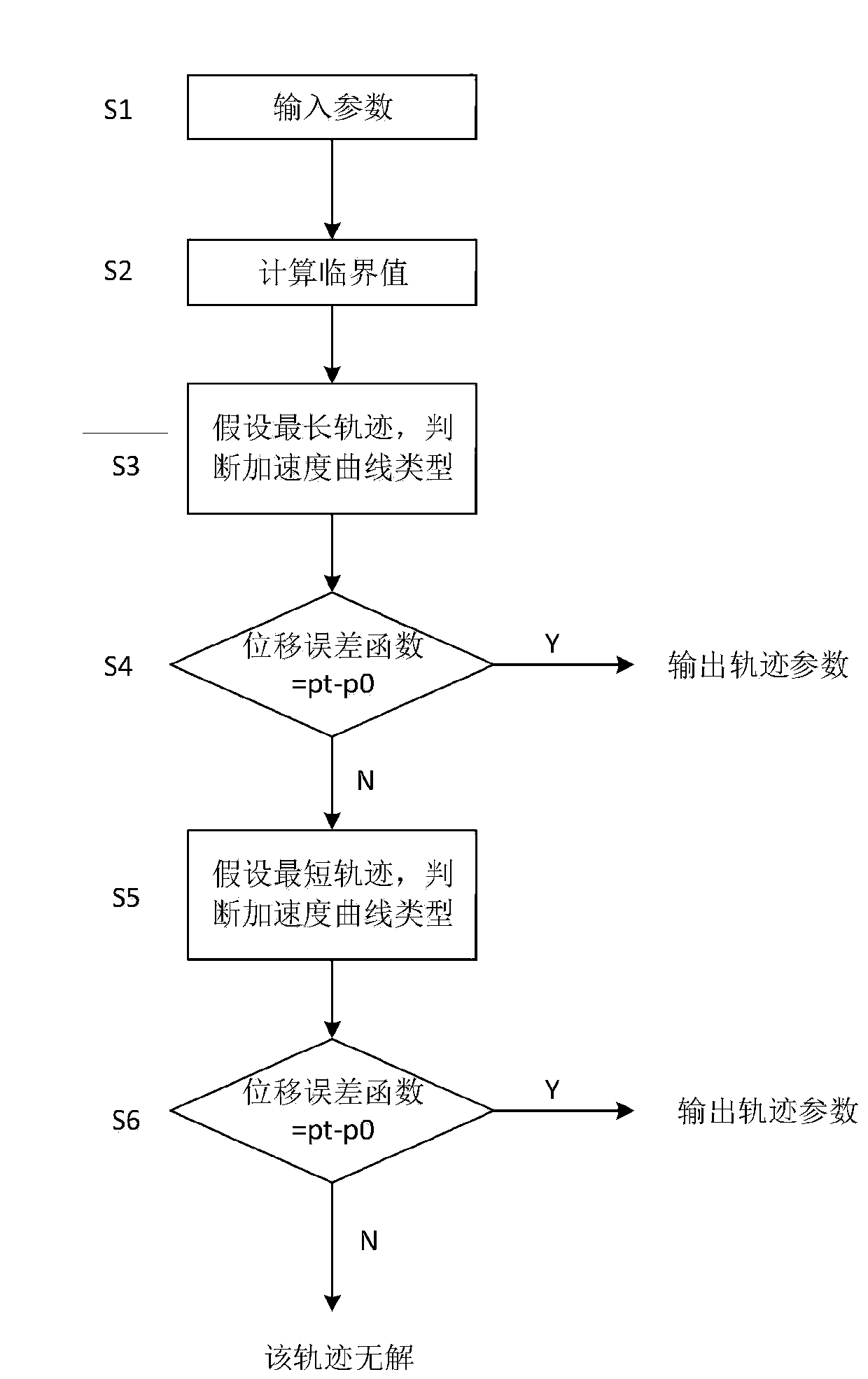
[0054] attached figure 2 The flow chart of the exemplary embodiment of the online trajectory planning method based on S-type velocity planning is provided in the present invention, comprising the following steps:
[0055] S1: Input the current initial motion state and target motion state of the robot. Including initial position p0, initial velocity v0, initial acceleration a0, target position pt, target velocity vt, target acceleration at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More