

Dynamic obstacle real-time obstacle avoidance method and system for multi-AGV system
A technology of system dynamics and obstacles, applied in the field of multi-AGV systems, can solve problems such as collisions and affecting the normal driving of AGVs, and achieve the effect of low algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
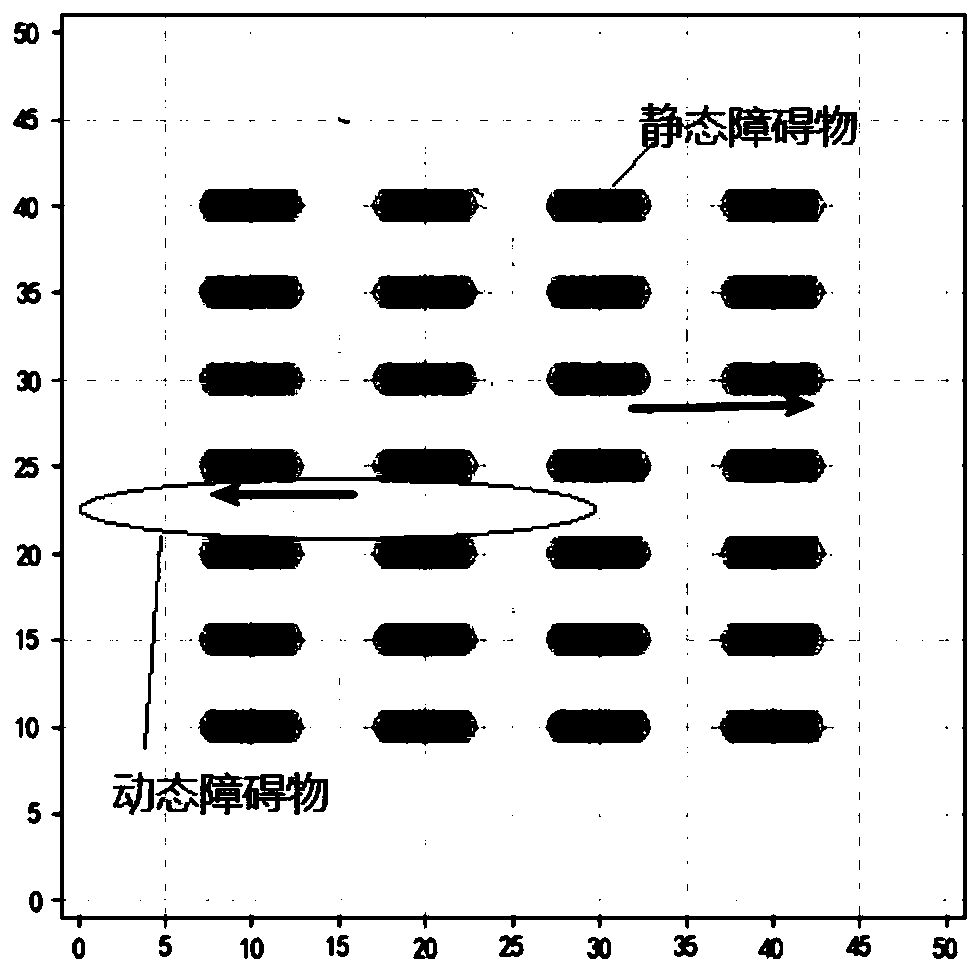
[0038] A real-time obstacle avoidance method for dynamic obstacles in a multi-AGV system. The method is based on a path planning algorithm. During the driving process of the AGV, through the method of obstacle matrix, the sensor is used to detect in real time whether there is an obstacle within the detection radius at the current position. If If there is an obstacle, the AGV will move to the closest point to the target point until the AGV moves to the target point.
[0039] Further, the method specifically includes the following steps:
[0040] Step 1, determine the target point of the handling task, and apply the path planning algorithm to generate the pre-driving path;
[0041] Step 2, the AGV moves according to the pre-travel path;
[0042] Step 3, determine whether the destination is reached, if yes, end the path planning, otherwise go to step 4;
[0043] Step 4, using a sensor, establishing an obstacle detection matrix S based on the sensor detection radius, and judging...
Embodiment 2
[0068] The present invention also provides a real-time obstacle avoidance system for dynamic obstacles in a multi-AGV system. The obstacle avoidance system includes a path planning algorithm module, a sensor detection module, and an obstacle avoidance algorithm module; The driving path of the point, the sensor detection module is used to detect the position of the obstacle in real time, and the obstacle avoidance algorithm module forms a driving path to avoid the obstacle based on the cost function when there is an obstacle in the detection area.
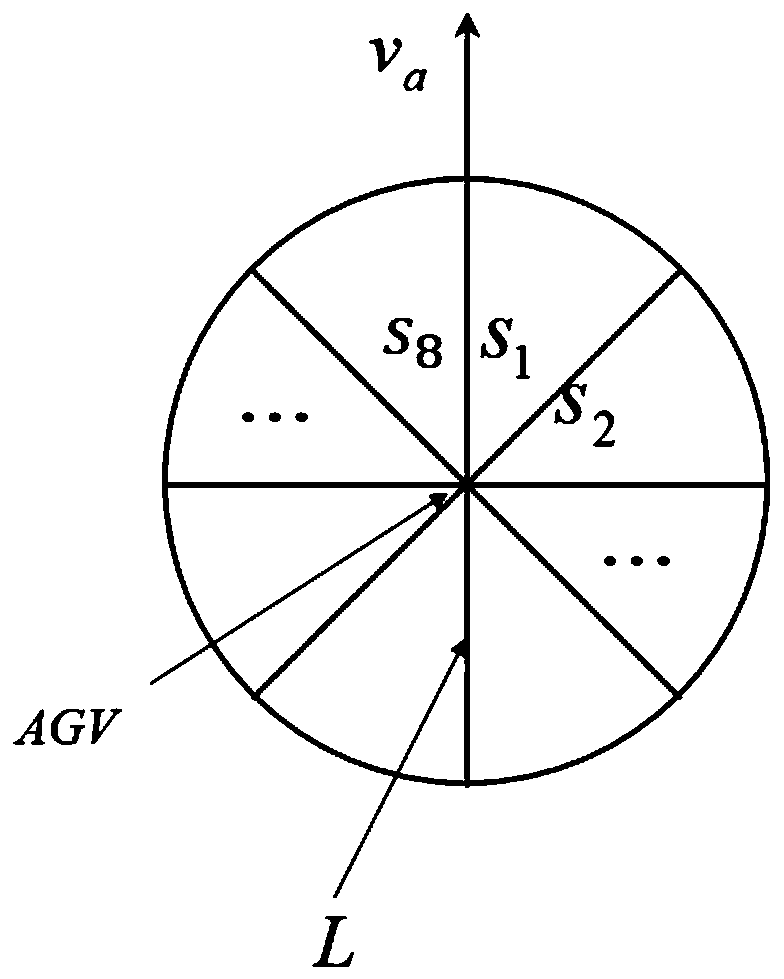
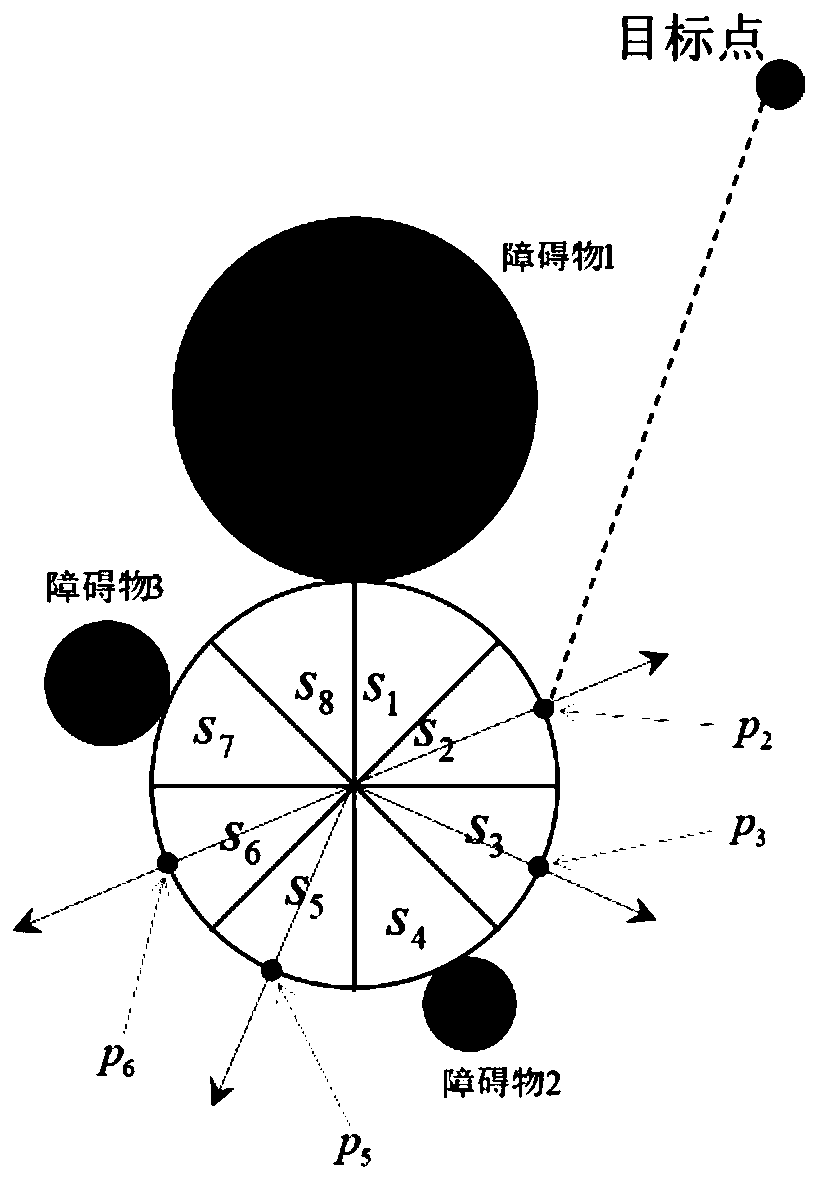
[0069] Further, the sensor detection module takes the AGV as the center of the circle, and the detection radius of the sensor is the detection area formed by the circle of the radius, and divides the detection area into several sectors equally; each sector is sequentially marked as S i , its value is 0 or 1, 0 means that no obstacle is detected in the current sector, 1 means that an obstacle is detected, then there is an obstacle dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More