

A follow-up control method, device, computer equipment and storage medium
A control method and technology of a computer program, applied in the field of photography, can solve the problems of not being sensitive enough to the action of the photographed object, difficult for the photographing equipment to accurately estimate the scale of the photographed object, unable to be in a back-to-back state for a long time, etc., and achieve the effect of good composition effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
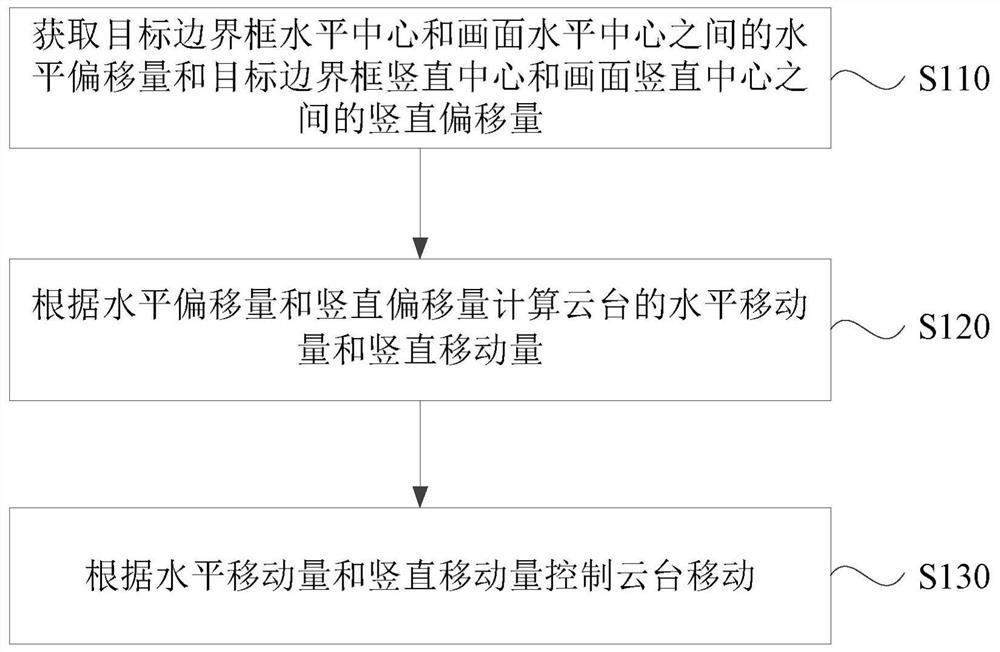
[0045] figure 1 This is a flowchart of a tracking control method provided in Embodiment 1 of the present invention. This embodiment can be applied to the situation of tracking control. The method can be executed by the tracking control device in this embodiment of the present invention. The device can use implemented in software and / or hardware, such as figure 1 As shown, the method specifically includes the following steps:
[0046] S110: Obtain the horizontal offset between the horizontal center of the target bounding box and the horizontal center of the picture and the vertical offset between the vertical center of the target bounding box and the vertical center of the picture.
[0047]The target bounding box is a portrait bounding box, and the target bounding box may be a portrait bounding box including only one human object, or may be a portrait bounding box including two or more human objects. limit. That is, a follow-up shot can be performed for one person object, or...
Embodiment 2
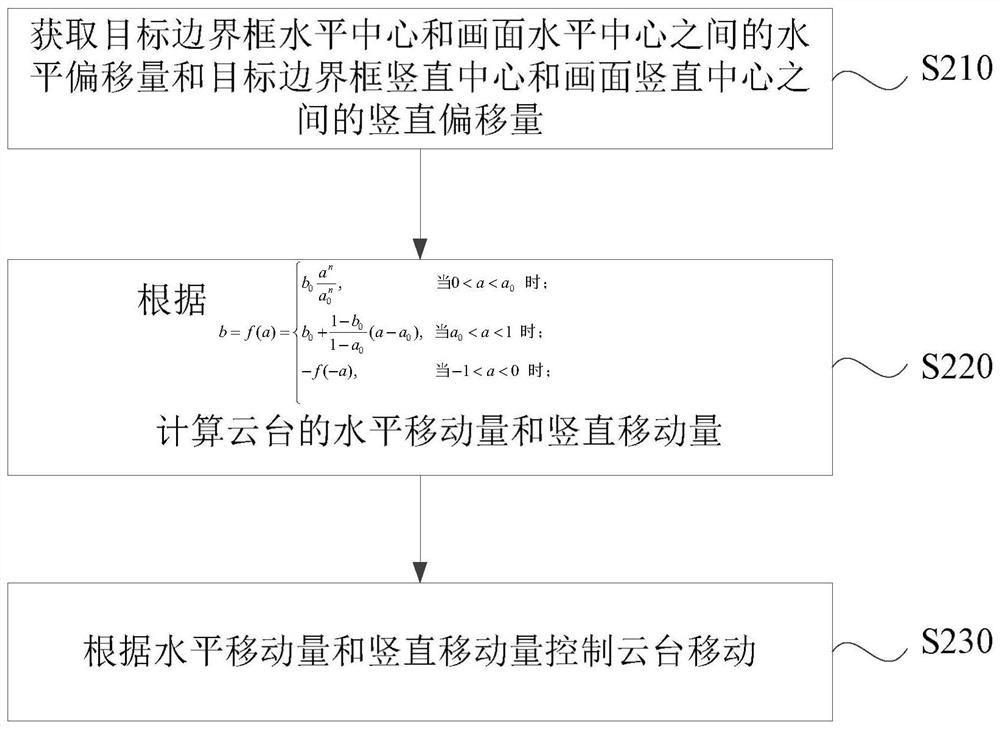
[0060] figure 2 This is a flowchart of a tracking control method in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiment. As an implementation form of this embodiment of the present invention, in this embodiment, the formula is Calculate the horizontal and vertical movement of the PTZ. Combine below figure 2 , the above situation of the tracking control method according to the embodiment of the present invention will be described.
[0061] like figure 2 As shown, the method of this embodiment specifically includes the following steps:
[0062] S210: Obtain the horizontal offset between the horizontal center of the target bounding box and the horizontal center of the picture and the vertical offset between the vertical center of the target bounding box and the vertical center of the picture.
[0063] Specifically, the coordinates of the upper left corner of the shooting screen are marked as (0,0), the coordin...
Embodiment 3
[0095] Figure 5 This is a schematic structural diagram of a tracking control device provided in Embodiment 3 of the present invention. This embodiment can be applied to the situation of tracking control, the device can be implemented in software and / or hardware, and the device can be integrated in any device that provides tracking control, such as Figure 5 As shown, the tracking control device specifically includes: an acquisition module 310 , a calculation module 320 and a control module 330 .
[0096] Wherein, the obtaining module 310 is used to obtain the horizontal offset between the horizontal center of the target bounding box and the horizontal center of the picture and the vertical offset between the vertical center of the target bounding box and the vertical center of the picture;
[0097] a calculation module 320, configured to calculate the horizontal movement amount and the vertical movement amount of the PTZ according to the horizontal offset and the vertical of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More