

Interference observer-based second-level inverted pendulum self-adaptive sliding-mode control method
A disturbance observer and adaptive sliding mode technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as difficulty in obtaining prior knowledge of disturbance and failure to consider the influence of observer estimation error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings.
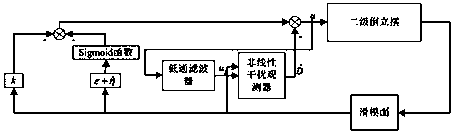
[0062] Such as figure 1 Shown, the concrete realization steps of the present invention are as follows:
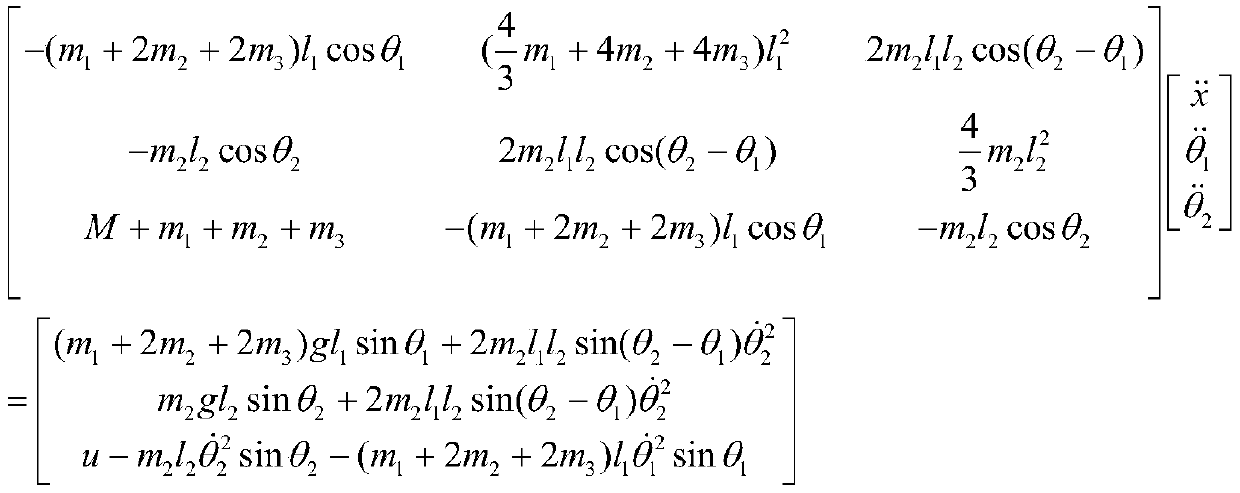
[0063] 1) Establish the differential equation of the two-stage inverted pendulum system according to the Lagrange equation:
[0064]
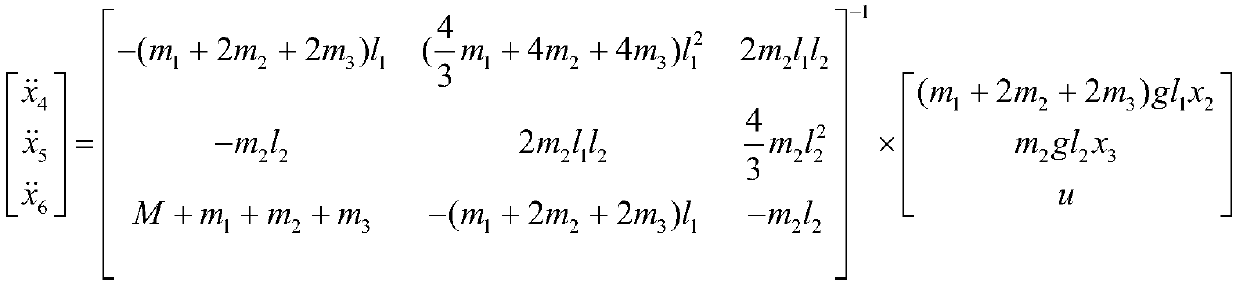
[0065] In the formula, x is the position of the car, θ 1 and θ 2 are the upper and lower swing angles of the swing rod respectively, due to the θ in the actual control process 1 and θ 2 The value is very small, without loss of generality, the above formula can be linearized at the equilibrium position:
[0066]
[0067] The above formula is further transformed, and the state equation and output equation of the linear two-stage inverted pendulum system considering the control disturbance are as follows:
[0068]
[0069] In the formula, d is the system control disturbance, and the matrices A, B, C, and D are as follows: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More