

Three-dimensional laser radar range finding method and device, and terminal device
A technology of radar ranging and three-dimensional laser, which is applied in measurement devices, radio wave measurement systems, and re-radiation of electromagnetic waves. The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
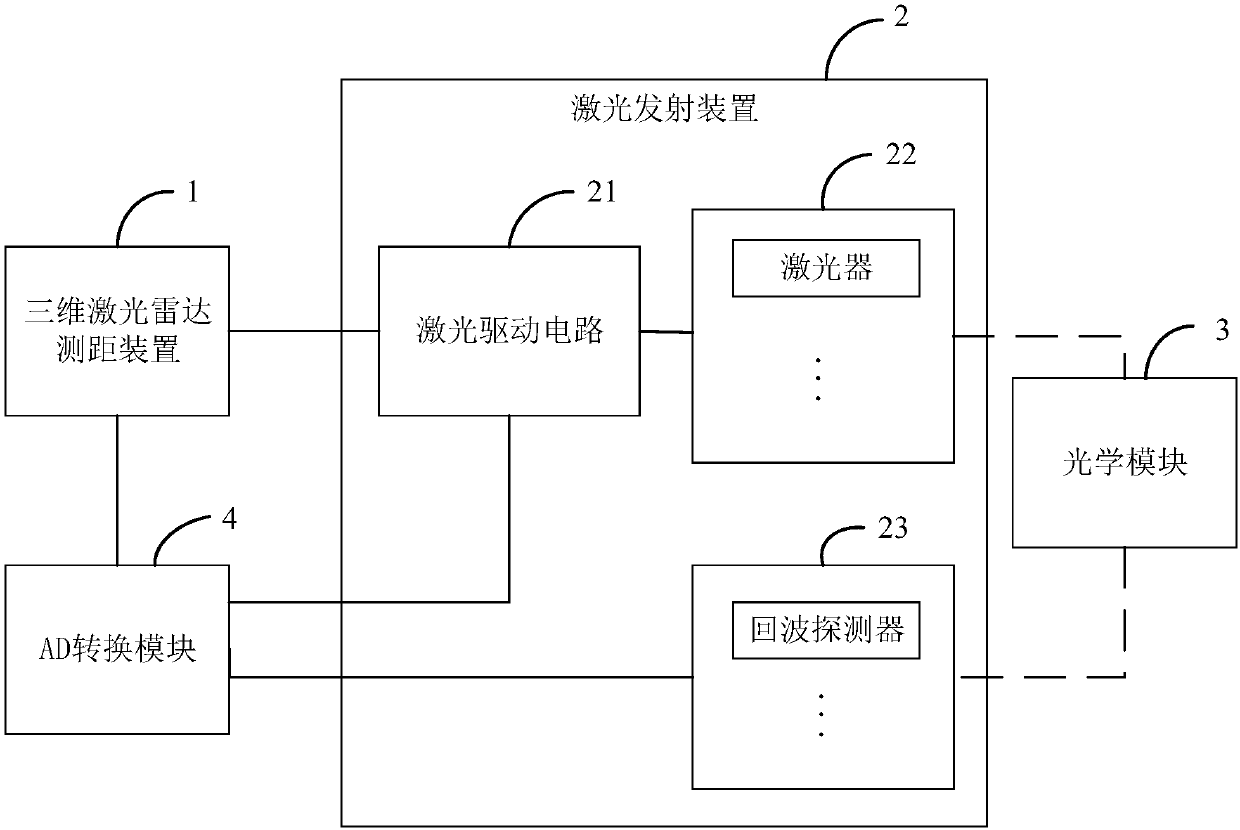
[0029] figure 1 A three-dimensional lidar ranging system provided by an embodiment of the present invention is shown, including a three-dimensional lidar ranging device 1, a laser emission device 2, an optical device 3 and an AD conversion device 4; the laser emission device 2 includes Laser drive circuit 21 , laser 22 and echo detector 23 .
[0030] In this embodiment, the three-dimensional lidar ranging device 1 is electrically connected to the laser driving circuit 21 and the AD conversion device 4 respectively, and the laser driving circuit 21 is respectively connected to the laser 22 and the AD conversion device. The device 4 is electrically connected, the laser 22 is optically connected to the optical device 3, the optical device 3 is optically connected to the echo detector 23, and the echo detector 23 is connected to the three-dimensional lidar ranging device It is electrically connected to the AD conversion device 4 .
[0031] The three-dimensional lidar ranging dev...
Embodiment 2
[0088] like Figure 4 As shown, an embodiment of the present invention provides a three-dimensional lidar ranging device 100 for executing figure 1 The method steps in the corresponding embodiment include:
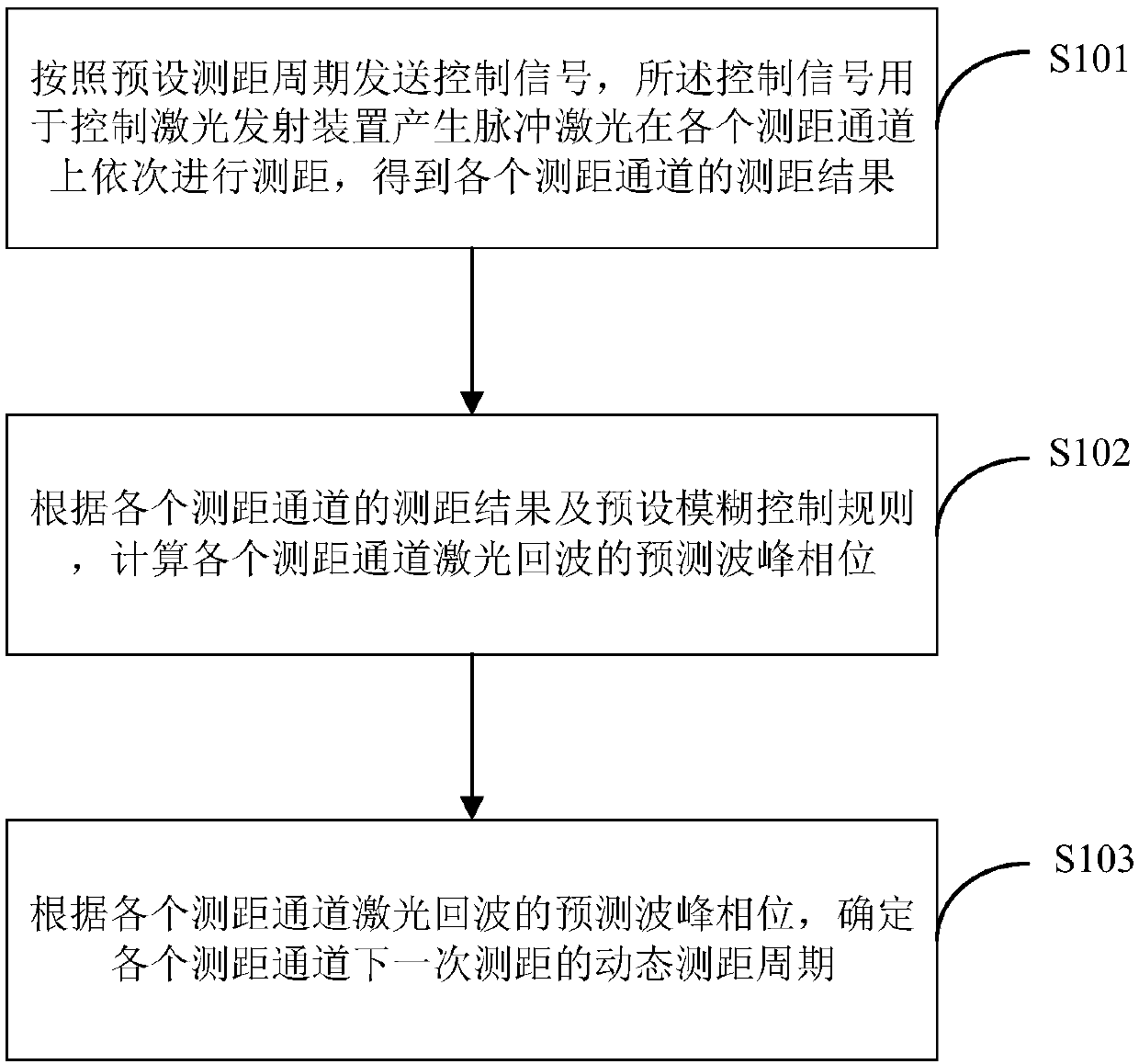
[0089] The ranging result calculation module 110 is configured to send a control signal according to a preset ranging period, and the control signal is used to control the laser emitting device to generate a pulsed laser to perform ranging on each ranging channel in sequence, and obtain the measurement results of each ranging channel. distance results.
[0090] The predicted peak phase calculation module 120 is configured to calculate the predicted peak phase of the laser echo of each ranging channel according to the ranging results of each ranging channel and the preset fuzzy control rules.
[0091] The dynamic ranging period calculation module 130 is configured to determine the dynamic ranging period of the next ranging of each ranging channel according to the predicte...
Embodiment 3
[0118] An embodiment of the present invention further provides a terminal device 7, including a memory 71, a processor 70, and a computer program 72 stored in the memory 71 and running on the processor 70, where the processor 70 executes the computer program 72 When implementing the steps in each of the embodiments as described in Embodiment 1, for example figure 1 Steps S101 to S103 are shown. Alternatively, when the processor 70 executes the computer program 72, the functions of each module in each device embodiment described in Embodiment 2 are implemented, for example, Figure 4 The functions of modules 110 to 130 are shown.
[0119] The terminal device 7 may be a computing device such as a desktop computer, a notebook, a palmtop computer, and a cloud server. The terminal device may include, but is not limited to, a processor and a memory. For example, the terminal device may further include an input and output device, a network access device, a bus, and the like.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More