

Robot mechanical hand clamping structure
A technology of manipulators and robots, applied in the field of robotics, can solve problems such as excessive opening angle of mechanical claws, easy clamping instability, and inability to adjust the position of the mechanical claws of the manipulator, so as to achieve the effect of firm grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
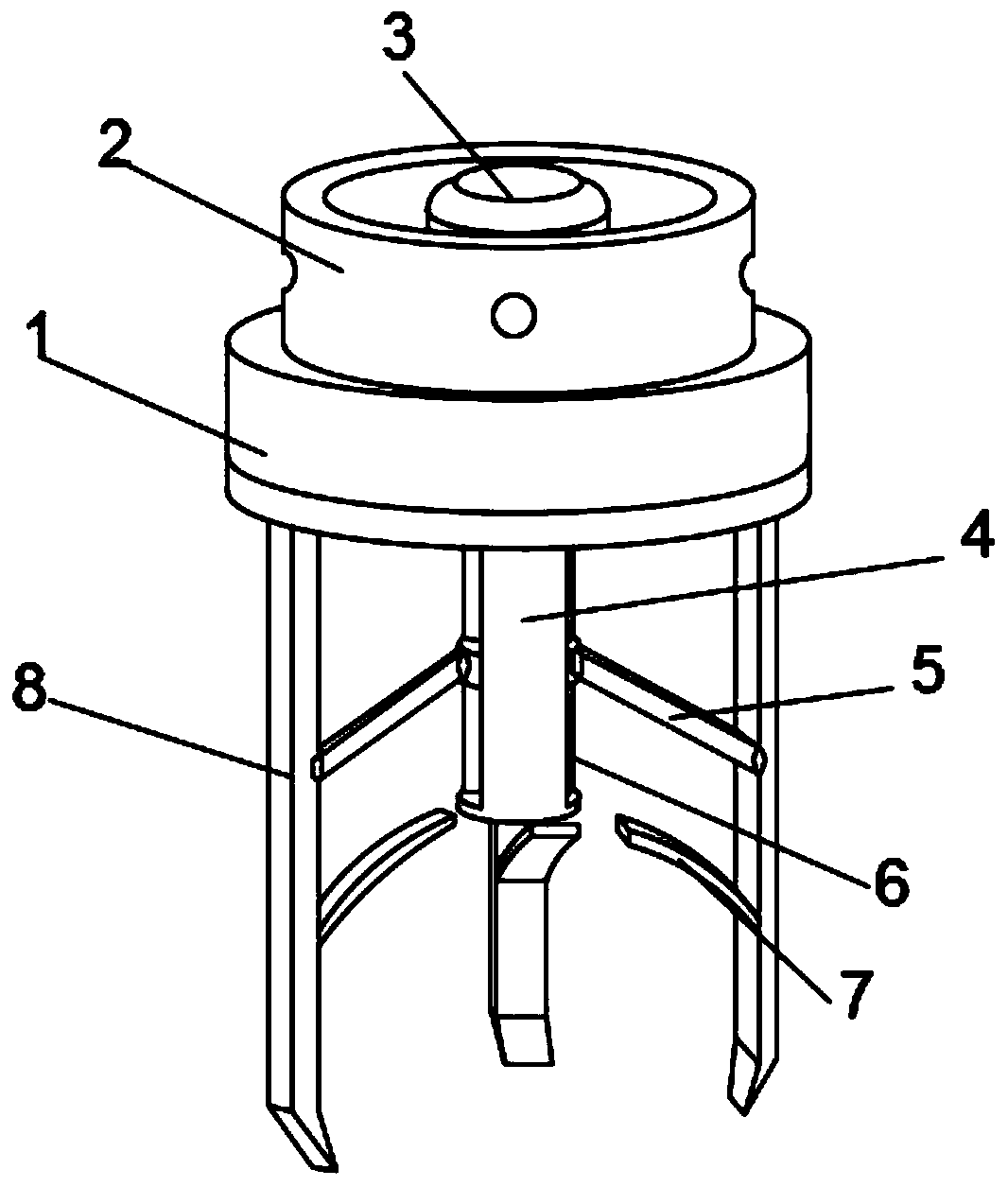
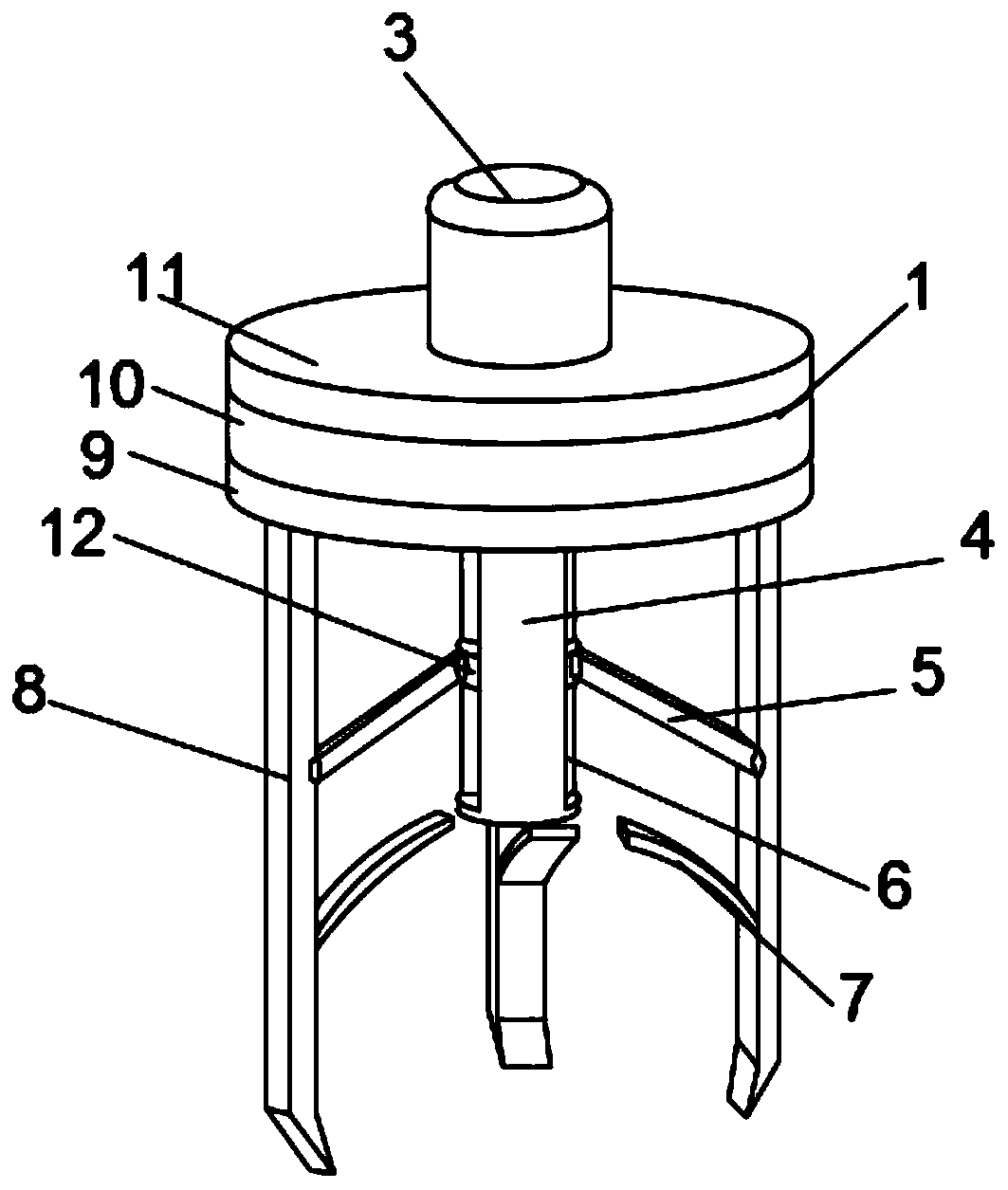
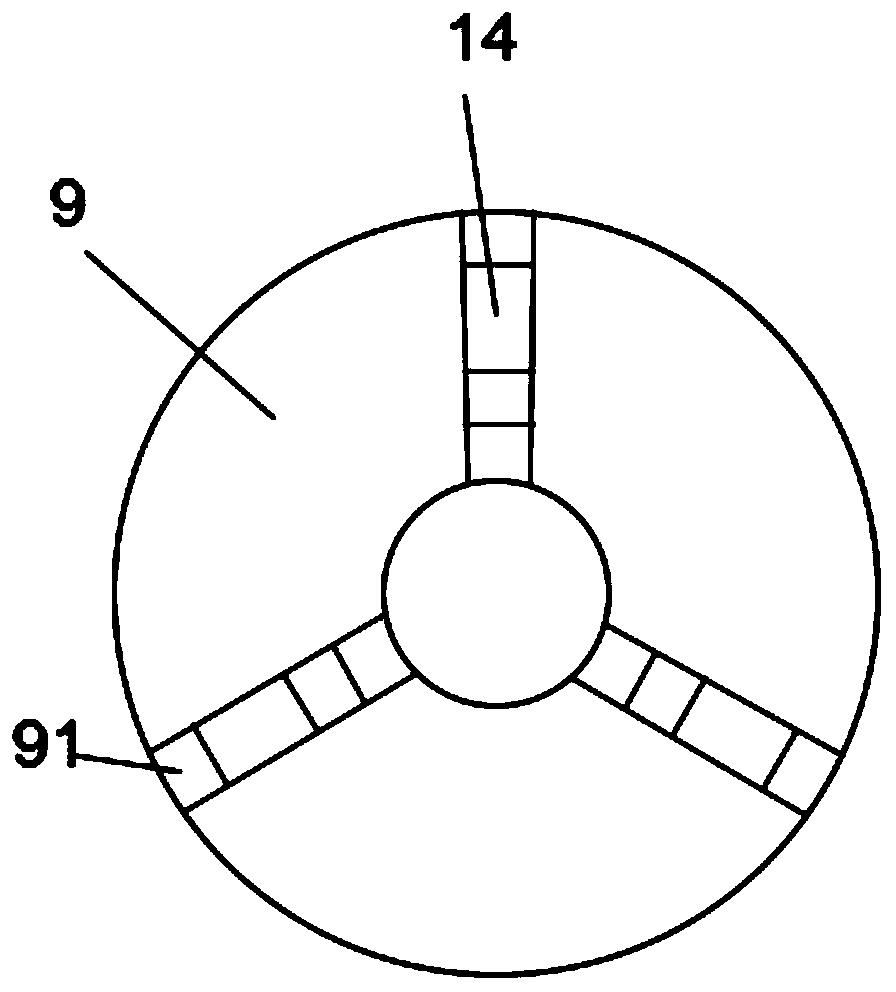
[0040] see Figure 1-7, this embodiment provides a gripping structure of a robot manipulator, including a housing 1, a mounting base 2 fixedly mounted on the housing 1, and a mechanical claw 8 mounted on the housing 1, wherein the mounting base 2 is provided with threading holes and bolt holes for installation, a motor 3 is fixedly installed on the top of the housing 1, the motor 3 is a servo motor, and a chuck 9, a turntable 10 and a chuck seat 11 are installed inside the housing 1, The turntable 10 is rotatably installed between the chuck 9 and the chuck seat 11, wherein the chuck 9 is fixedly installed with the housing 1, and the turntable 10 is rotatably installed with the casing 1, so that the turntable 10 can rotate inside the casing 1, The chuck seat 11 is fixedly connected with the housing 1 by bolts, the chuck 9 is slidably mounted with a block 14 that can slide outwards, the block 14 is slidably mounted with a slider 15, and on the slider 15 The first rotating shaft...
Embodiment 2
[0048] see Figure 7-13 , on the basis of Embodiment 1, a further improvement is made: the two sides of the block 14 are provided with a clip chute 143 that matches the clip 93, and the side away from the gear groove 144 is provided with a clip that matches the clip 93. The chute 143 is parallel to the T-shaped slideway 141, the inside of the T-shaped slideway 141 is rotatably equipped with a second screw 142, and the top of the second screw 142 is provided with a hexagon socket bolt hole for adjustment; Block 15 is provided with T-shaped slide block 152 in the same body near clamping block 14, and T-shaped slide block 152 matches with T-shaped slideway 141, and T-shaped slide block 152 and T-shaped slideway 141 can prevent slide block 15 from following the first step. The second screw rod 142 rotates to limit the slider 15, and the second screw rod 142 runs through the T-shaped slider 152 and is rotatably connected with the T-shaped slider 152. The rotation of the second scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More