

Improved ORB-SLAM algorithm for outdoor offline navigation system
An offline navigation and outdoor technology, applied in computing, computer components, instruments, etc., can solve problems such as low accuracy and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0088] Comparison experiment of the number of feature points extracted:
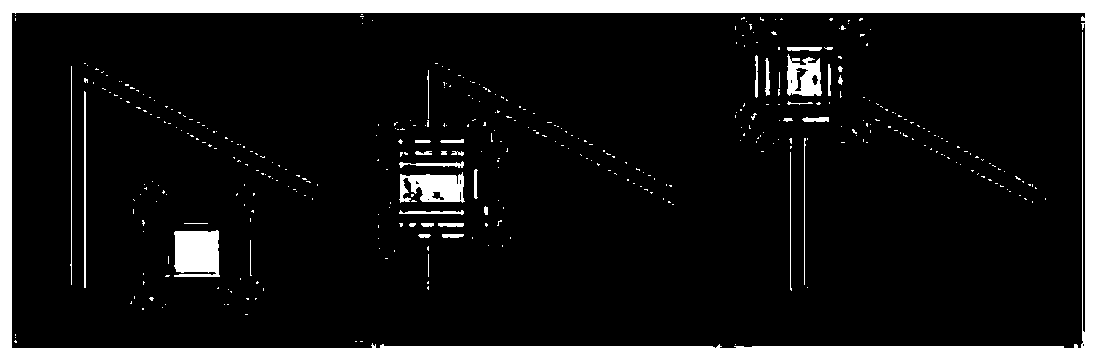
[0089] The present invention compares different images of the same scene, by changing the brightness of the image, the SIFT algorithm such as Figure 4 As shown, the OFAST algorithm before optimization is as Figure 5 As shown, and the optimized OFAST algorithm such as Figure 6 As shown, the comparison chart of the feature point extraction effect is compared
[0090] As shown in Table 1, in the experimental results, the number of feature points extracted by the SIFT algorithm is 206, the number of feature points extracted by the original OFAST algorithm is 179, and the number of feature points extracted by the improved OFAST algorithm is 116
[0091] Compared with the original OFAT algorithm, the improved OFAST algorithm reduces the number of feature points by 35.2%. It can be seen that the number of feature points extracted by the algorithm in the present invention is far less than that of the origi...
Embodiment 2
[0095] AVERAGE TIME COMPARISON EXPERIMENT
[0096] The extraction time represents the speed of the algorithm in extracting feature points. When navigating in the wild environment, time is a major focus, and the faster the time, the stronger the algorithm performance;
[0097] Table 2 Average Time
[0098]
[0099] As shown in Table 2, the SIFT algorithm extracts feature points in 375.3s, the original OFAST algorithm extracts feature points in 9.3s, and the improved OFAST algorithm extracts feature points in 1.3s. The timeliness of feature points is increased by 80.6%, and the improved OFAST is 99.6% faster than SIFT algorithm in extracting feature points. It can be seen that the improved OFAST algorithm saves a lot of time, and its work efficiency is much higher than the original OFAST algorithm and SIFT algorithm.
Embodiment 3
[0101] Matching accuracy comparison experiment
[0102] The matching accuracy of extracted feature points plays an important role in the later mapping. The higher the matching accuracy, the better the effect of later mapping, and the clearer the route planning.
[0103] Table 3 matching accuracy
[0104]
[0105] As shown in Table 3, the correct rate of the SIFT algorithm is 15.2%, the correct rate of the original OFAST algorithm is 37.4%, and the correct rate of the improved OFAST algorithm is 51.8%. Compared with the original OFAST algorithm, the correct rate of the improved OFAST algorithm is 14.4%. The correct rate is 51.8%. The correct rate of the improved OFAST algorithm is 36.6% higher than that of the SIFT algorithm. It can be seen that the improved OFAST algorithm can match feature points more accurately, and the accuracy is much greater than the original OFAST algorithm and SIFT algorithm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More