

Lizard-simulating robot with traveling and rolling functions
A technology of robots and walking motors, applied in the field of robots, can solve problems such as difficulty in ensuring long-term motion ability and poor reliability of main parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
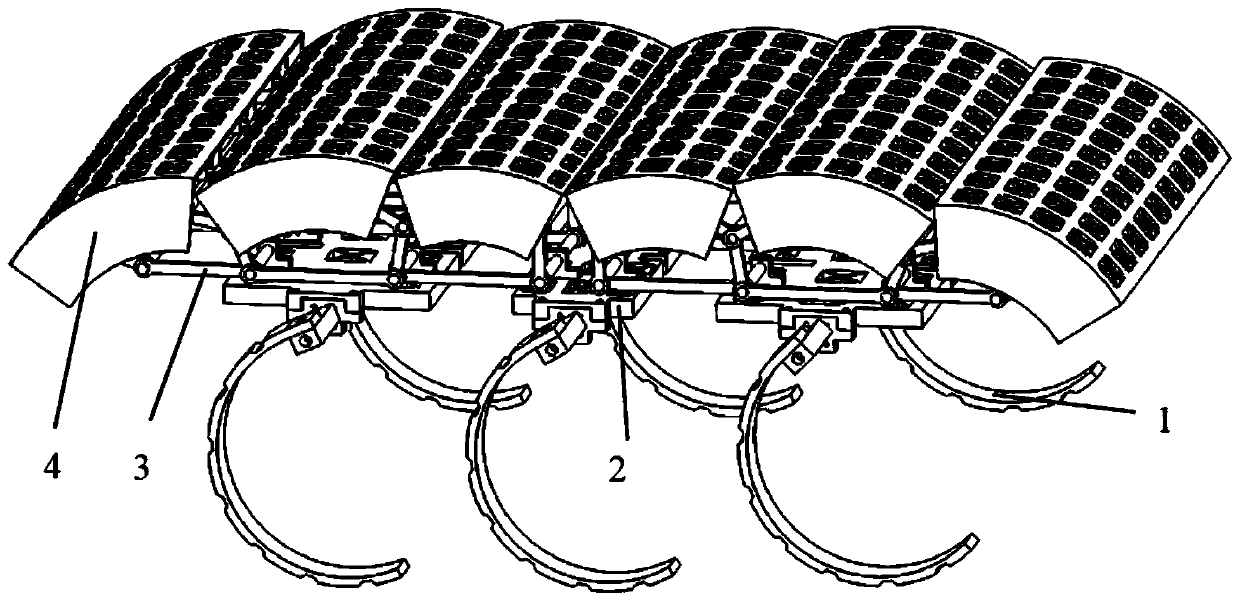
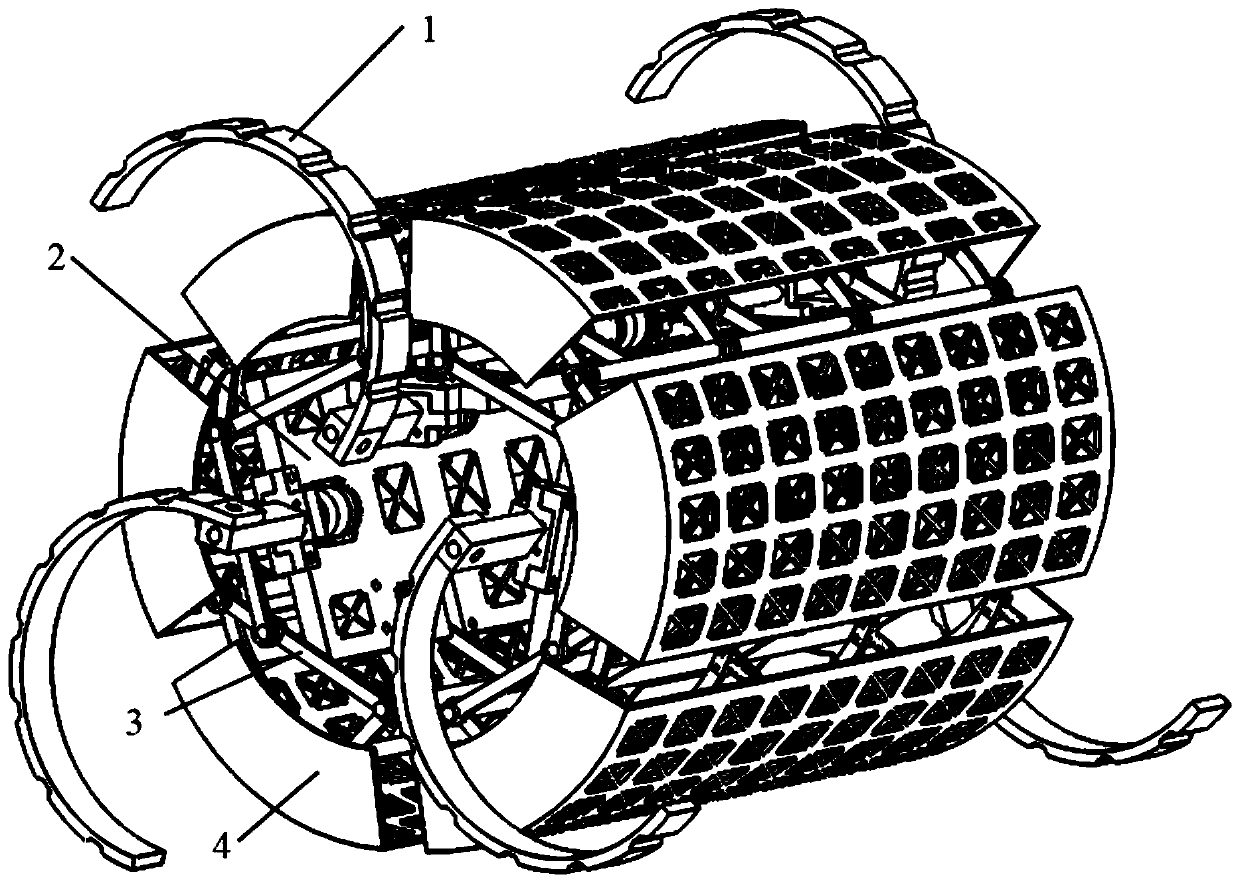
[0050] Reference figure 1 , figure 2 , The lizard-like robot with walking and rolling functions of the present invention includes a walking module 1, a trunk module 2, a deformation module 3, and a buffer module 4.
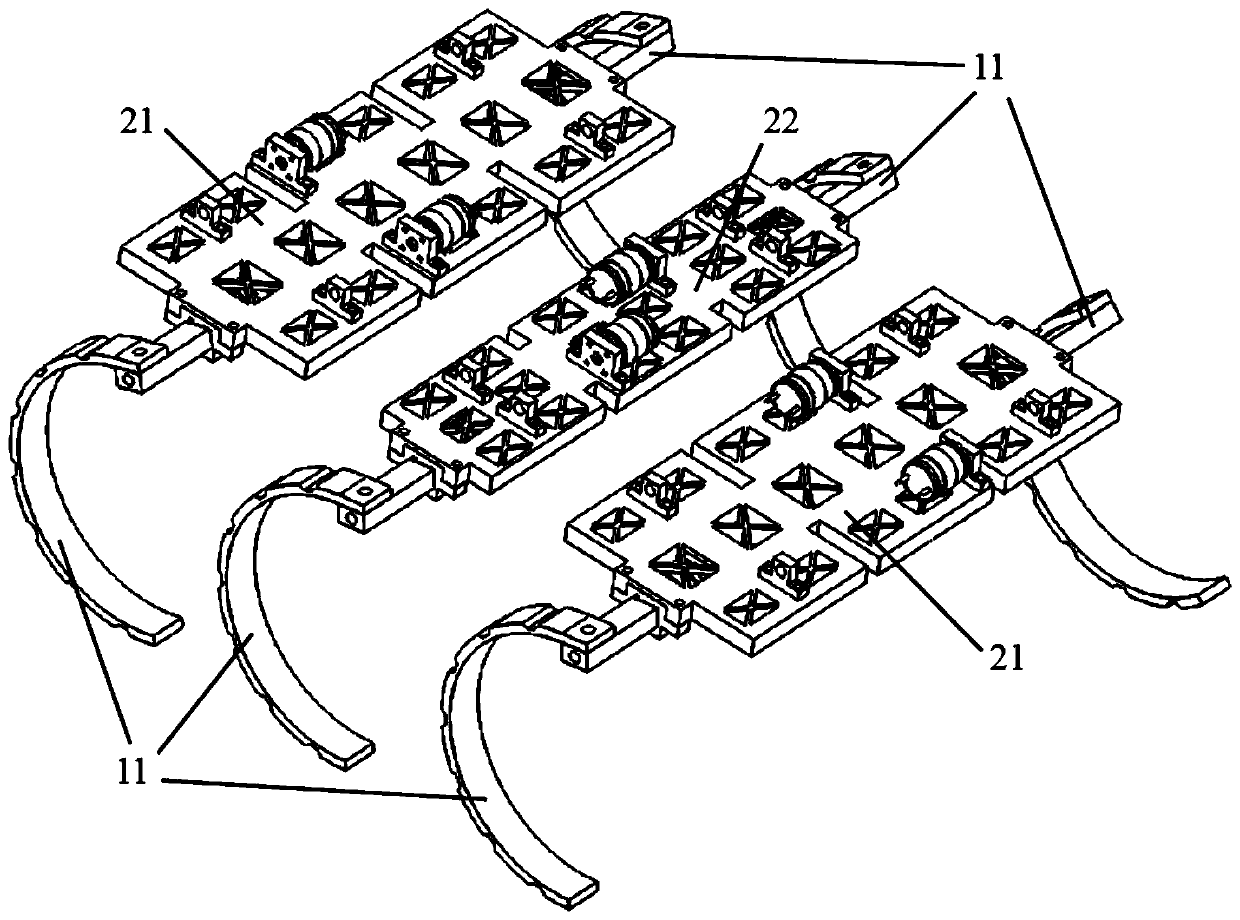
[0051] Reference figure 1 , figure 2 , image 3 , The walking module 1 includes 6 identical leg structures 11.
[0052] Reference figure 1 , figure 2 , image 3 , Figure 4 , The leg structure 11 includes four parts: a walking motor 111, a walking motor bracket 112, a leg connecting block 113, and a leg 114. The connection relationship between the various components is: the walking motor 111 is fixedly connected to the walking motor bracket 112; the main shaft of the walking motor 111 and the leg 114 are fixedly connected by the leg connecting block 113, so that the relative rotation of the leg 114 and the walking motor bracket 112 can be realized.
[0053] Reference figure 1 , figure 2 , image 3 , The torso module 2 includes two side torso structures 21 and a middl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More