

Running device of bionic foot robot
A technology of robots and walking devices, applied in the field of robots, can solve the problems of high ground flatness requirements, failure to maintain crawlers, wear and tear, etc., and achieve the effects of good structural performance, simple structure, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
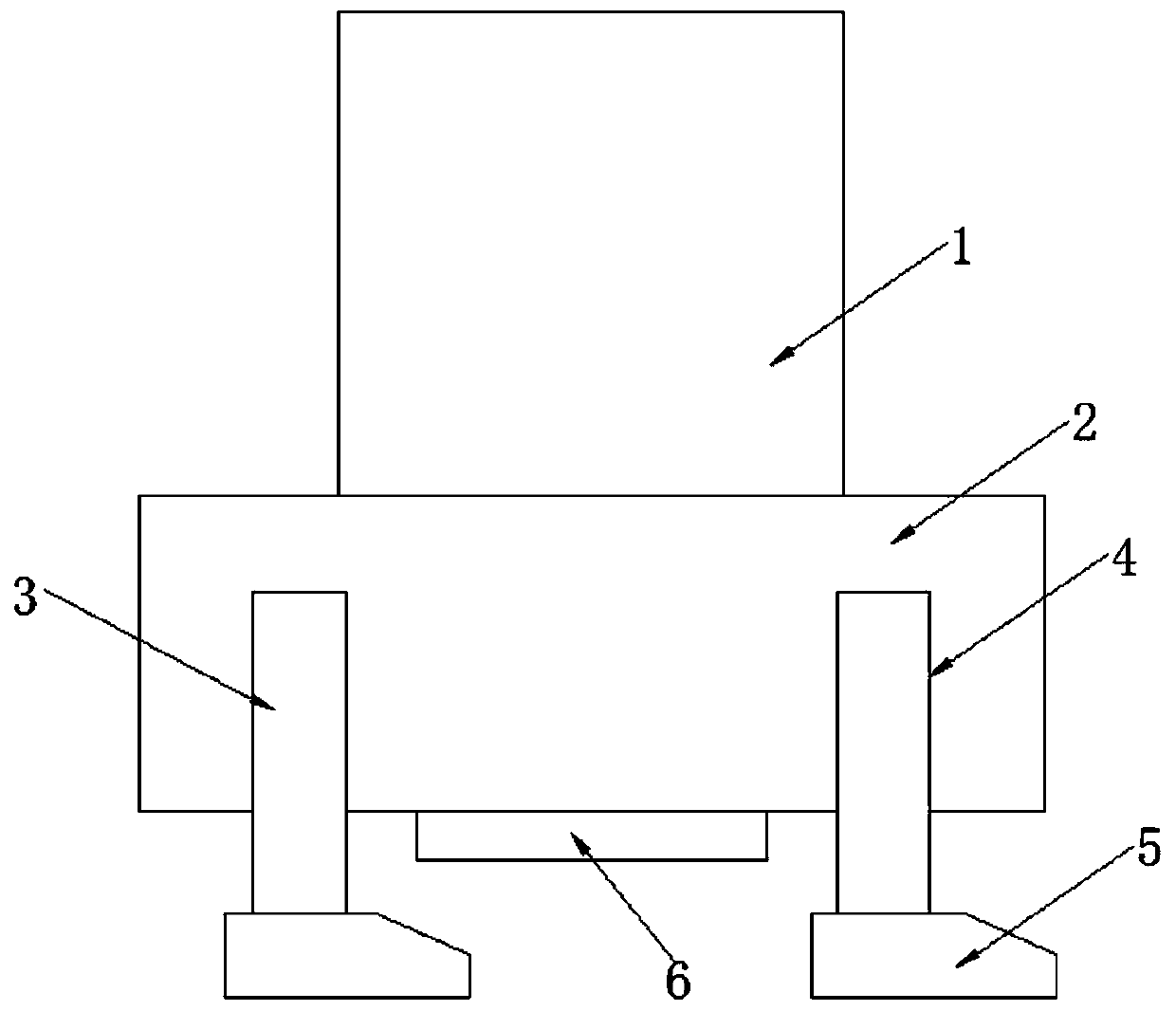
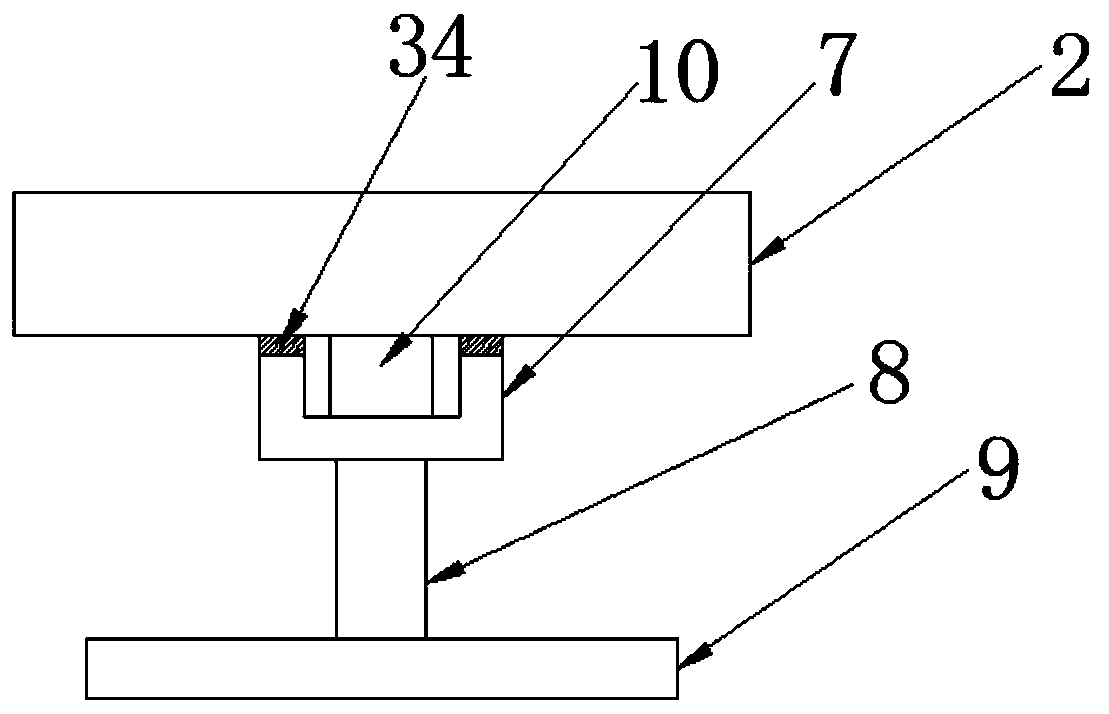
[0026] Embodiment one, such as Figure 1-2 As shown, the walking device of a kind of bionic legged robot according to the embodiment of the present invention comprises a robot body 1, the lower end of the robot body 1 is provided with a walking device 2, and both sides of the walking device 2 are provided with a support bar-3 and a support The lower ends of rod two 4, support rod one 3 and support rod two 4 are all provided with support blocks 5, and in order to increase the friction between the support block 5 and the ground, the inventor evenly provides some sawtooth 33 at the lower end of support block 5, To make the walking device 2 more stable during the movement, the bottom of the walking device 2 is provided with a steering device 6, wherein the steering device 6 includes a support plate 7, and both sides of the upper end of the support plate 7 are connected to the lower end of the walking device 2 , the lower end of the support plate 7 is provided with a hydraulic cyli...
Embodiment 2
[0027] Embodiment two, the structure and effect of the walking device 2 are specifically described below.
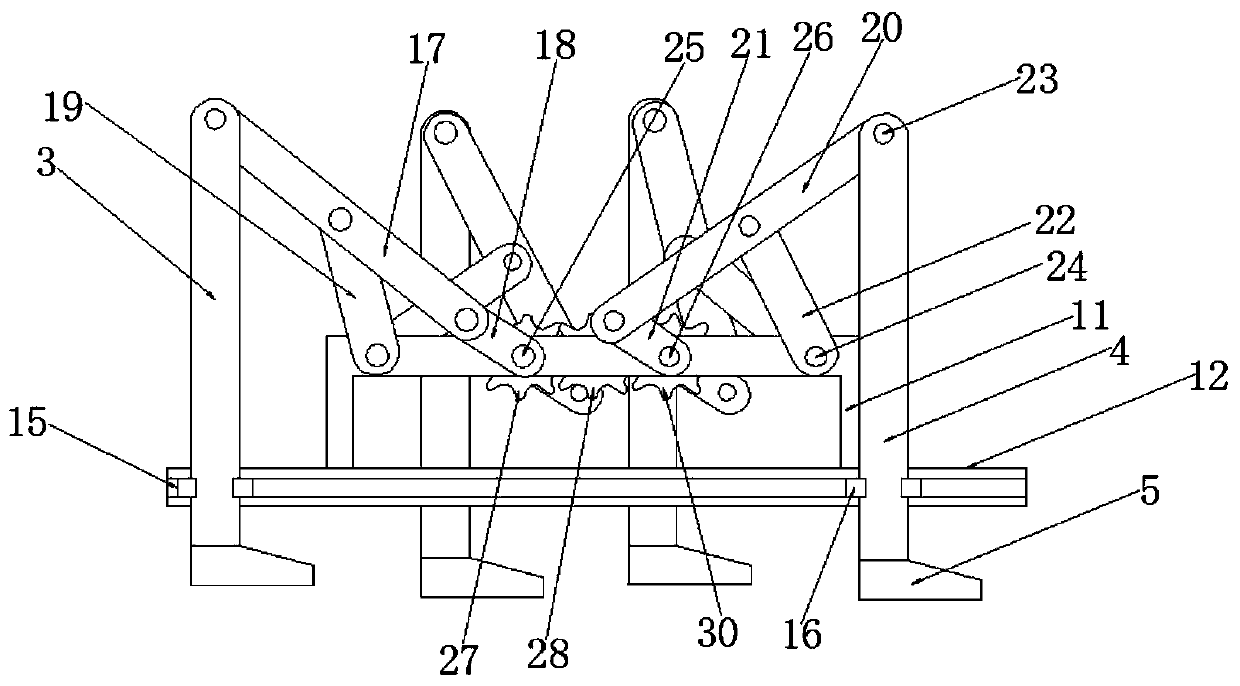
[0028] like image 3 Shown, walking device 2 comprises fixed frame 11, for the design of fixed frame shape, generally adopts the design of cuboid, and, the upper end of fixed frame 11 is connected with robot body 1, and the lower end of fixed frame 11 is connected with steering gear 6. The output end of the rotating motor 10 is connected. The function of the fixed frame 11 is mainly to play a supporting role. It should be noted here that the walking device 2 has a symmetrical structure, and the structures on both sides of the fixed frame 11 are the same. Here, the focus is on the fixed The concrete structure of frame 11 one side, the lower end side of fixed frame 11 is provided with chute 12, and the inner side of chute 12 is provided with slide block one 13, and the inside other side of chute 12 is provided with slide block two 14, And, slide block one 13 and slide blo...
Embodiment 3
[0031] Embodiment 3, the structure and function of the rotating mechanism will be specifically introduced below.
[0032] like Figure 5 As shown, the rotating mechanism includes gear one 27, gear two 28, gear three 29 and gear four 30, and gear one 27 and gear two 28 mesh with each other, gear three 29 and gear four 30 mesh with each other, and gear one 27 is sleeved on On movable shaft one 25, gear four 30 is set on movable shaft two 26, and one side of gear two 28 is provided with motor one 31, and one side of gear three 29 is provided with motor two 32, and, motor one 31 and motor two 32 are positioned at the inner both sides of fixed frame 11 respectively, by the rotation of two groups of motors, can realize the rotation of gear one 27 and gear four 30, and then drive the motion of movable shaft one 25 and movable shaft two 26.
[0033] In order to facilitate the understanding of the above-mentioned technical solution of the present invention, the working principle or op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More