

Path Planning Method for Manipulator Based on Velocity Smooth Deterministic Policy Gradient
A deterministic, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as excessive acceleration, manipulator jitter, manipulator arm damage, etc., to reduce joint acceleration, improve training speed, and improve space. The effect of search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
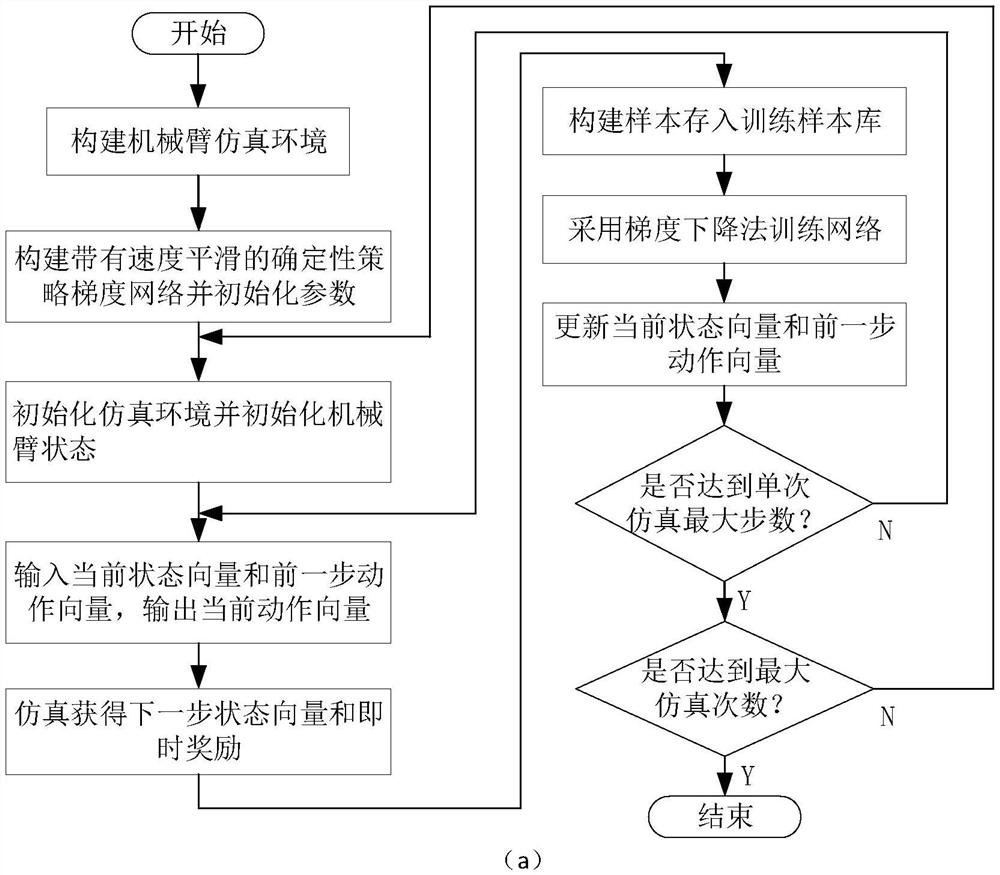
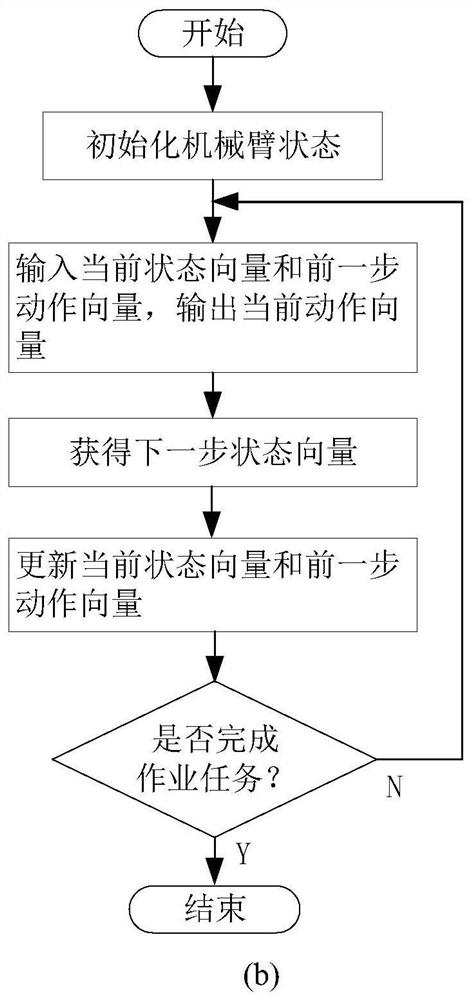
[0025] In the present invention, the path planning method of the manipulator based on the velocity smooth deterministic strategy gradient takes the end of the manipulator to reach the specified pose as the task, and divides the path planning into a training phase and a testing phase. The training phase flow is as follows: figure 1 As shown in (a), it mainly includes the following steps:
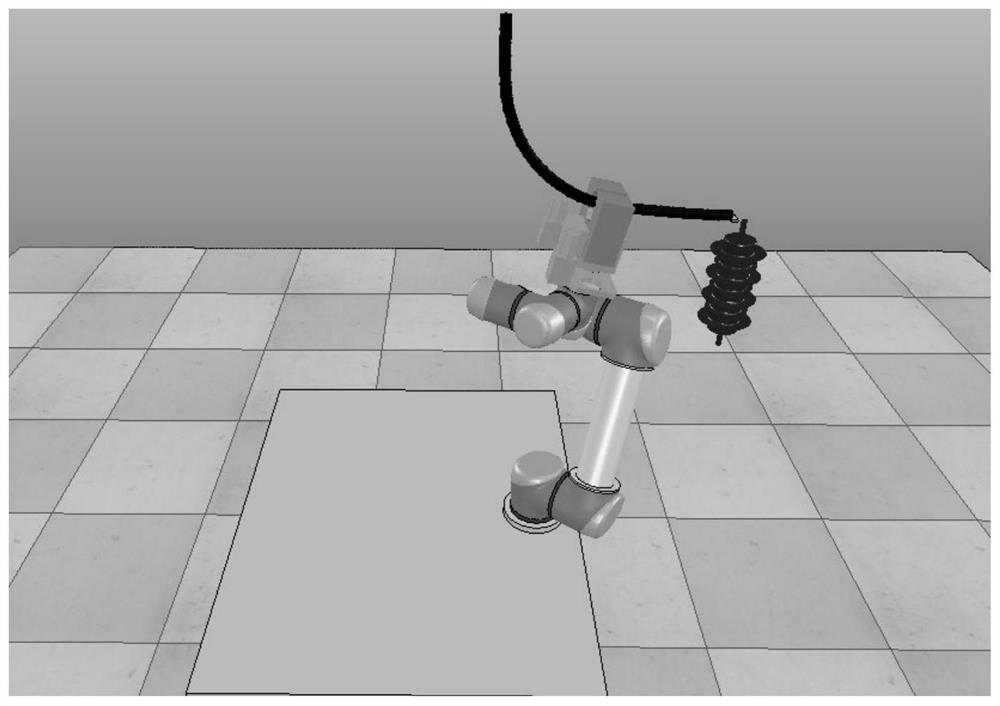
[0026] Step 1. Construct a simulation environment of the manipulator with job task feedback. The specific steps are as follows:
[0027] Use virtual simulation technology to build a simulation environment for manipulators with job task feedback, such as figure 2 shown. The simulation environment has input and output interfaces. The input interface can input the initial state of the manipulator (the initial angle of each joint of the manipul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More