

Driverless vehicle path planning method and device
A technology for unmanned vehicles and path planning, which is applied in transportation and packaging, vehicle position/route/height control, motor vehicles, etc. limited and other problems, to achieve the effect of ensuring global optimality and local real-time performance, and improving the efficiency of program operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
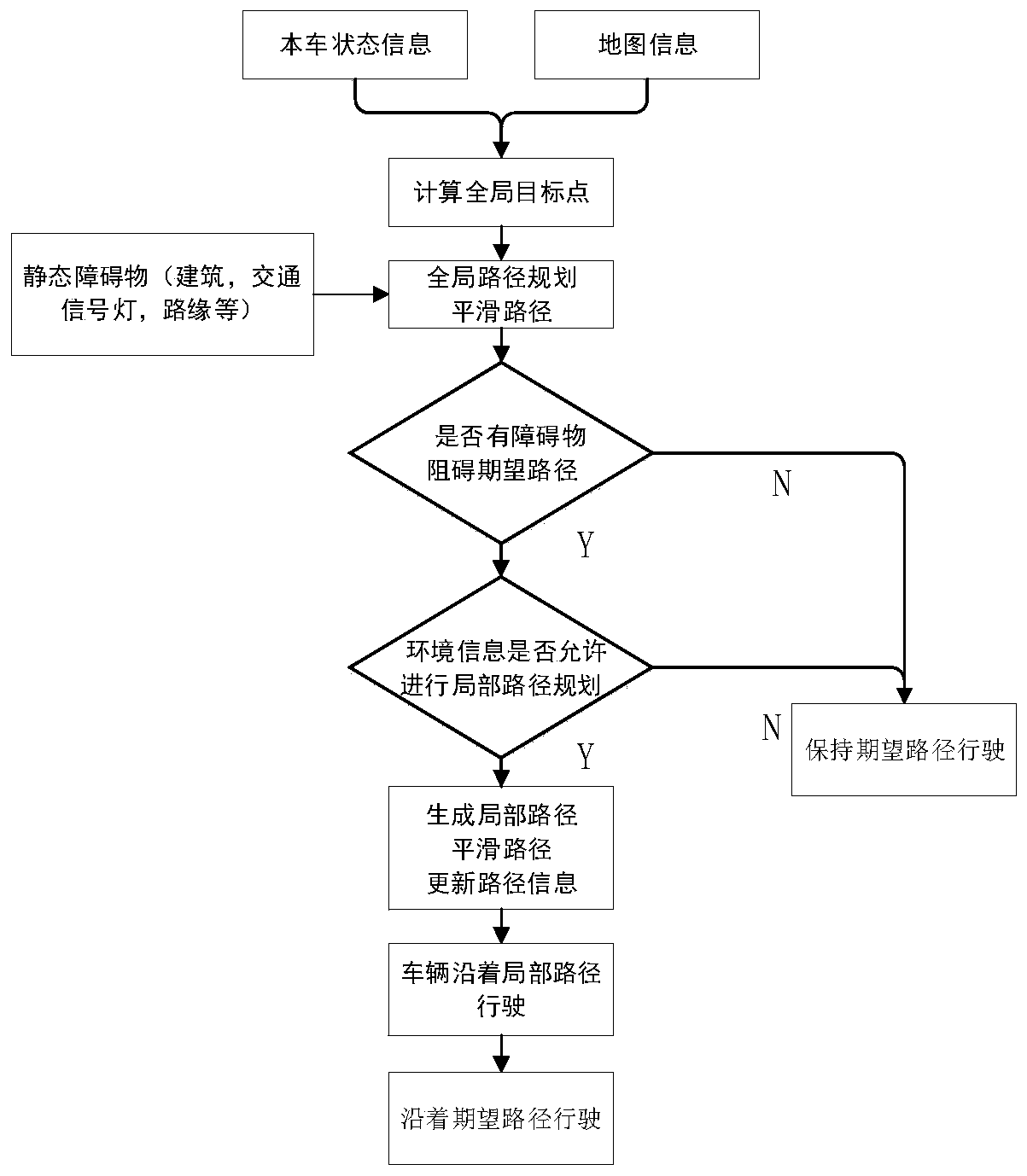
[0044] Such as figure 1 As shown, the unmanned vehicle path planning method of the embodiment of the present invention comprises the following steps:
[0045] Step 1, positioning, the specific implementation steps are as follows:
[0046] Step S101, loading the global map:
[0047] Load a global map containing the starting point and the target point according to the starting point and the target point. The map contains all known stationary obstacles (such as buildings, traffic lights, curbs, etc.), these obstacles are represented by polygons, polygons The size of is slightly larger than the actual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More