

Multi-drone path planning method based on minimization of mission completion time
A task completion time, multi-UAV technology, applied in the field of multi-UAV path planning based on the minimization of task completion time, can solve the problem of not considering the UAV energy consumption limit, excessive load of a single UAV, Issues such as UAV mission coordination are not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0107] A multi-UAV path planning method based on the minimization of task completion time, the specific application is as follows:
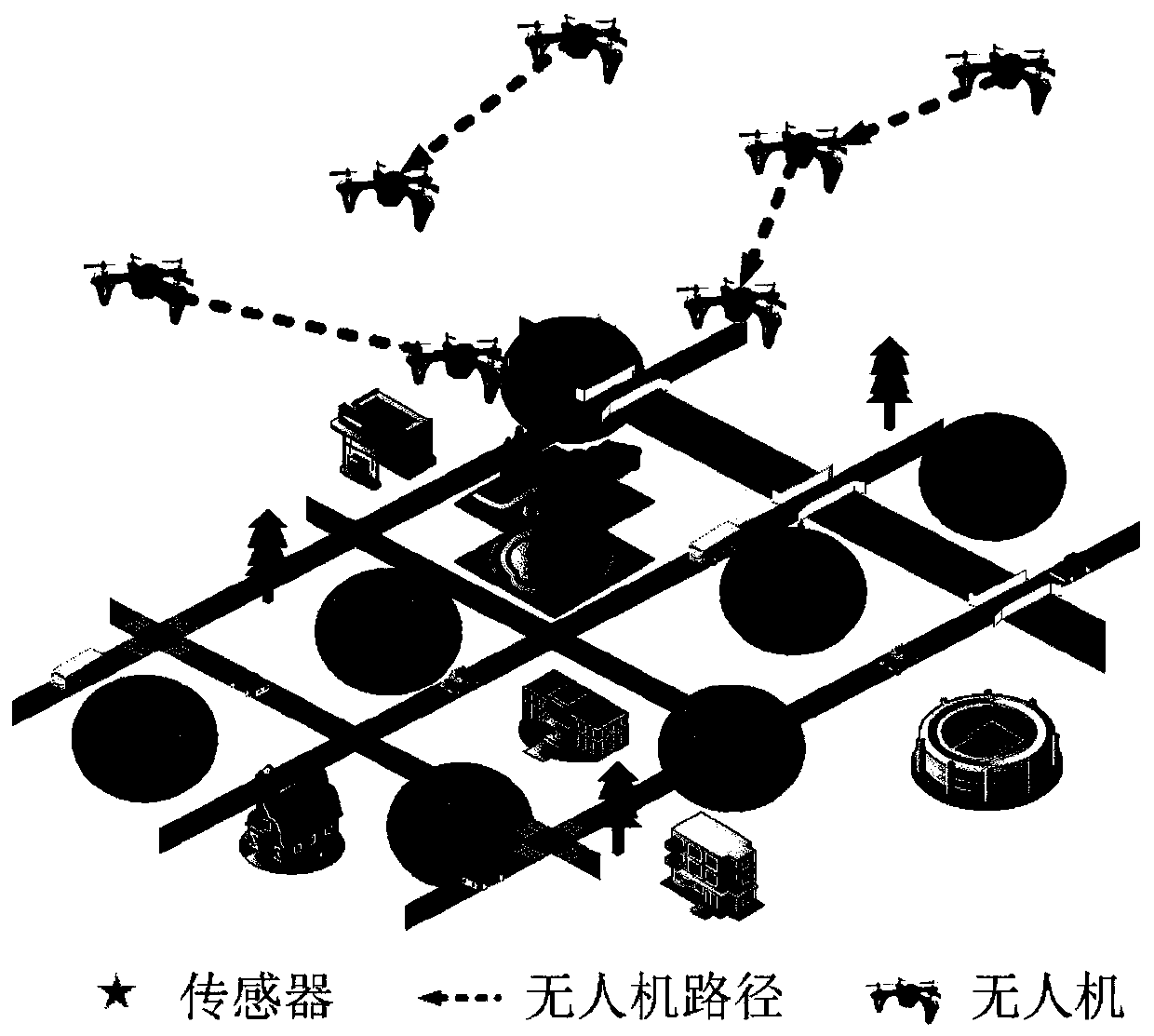
[0108] Such as figure 1 As shown, consider using multiple UAVs to collect information from N sensors in an area of 5km×5km. The flying height of drones is 50m, the minimum distance between drones for collision avoidance is 100m, and the communication radius projected on the ground is 500m. The information transmission power is 10dBm, the total bandwidth is 1MHz, the Gaussian white noise power is -110dBm, and the channel power gain per meter is 50dBm. In this embodiment, four different path planning methods are compared: 1) each drone is responsible for the same number of sensors. First calculate a path covering all sensors, and then decompose the path according to the principle of equal number of tasks; 2) Use the algorithm of the multi-traveling salesman problem to get the trajectory of each drone; 3) Use the K-means algorithm to calculate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More