

Non-human multi-target real-time track extraction method in traffic video scene
A technology for extracting video scenes and trajectories, applied in the field of intelligent transportation, can solve problems such as inapplicability, single application of vehicle detection and tracking, and less attention to the actual application of traffic scenes in the solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0102] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative work all belong to the protection scope of the present invention.
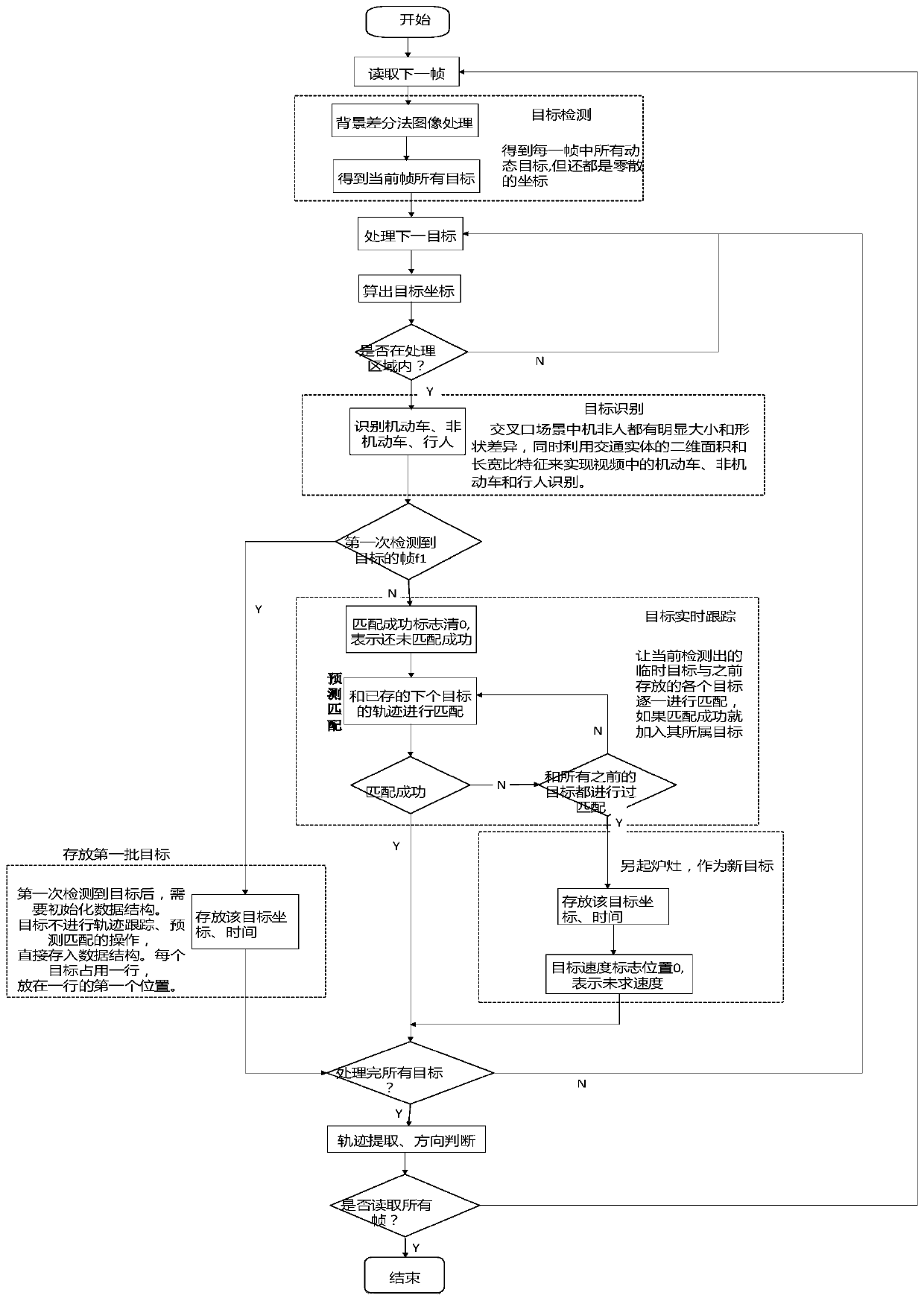
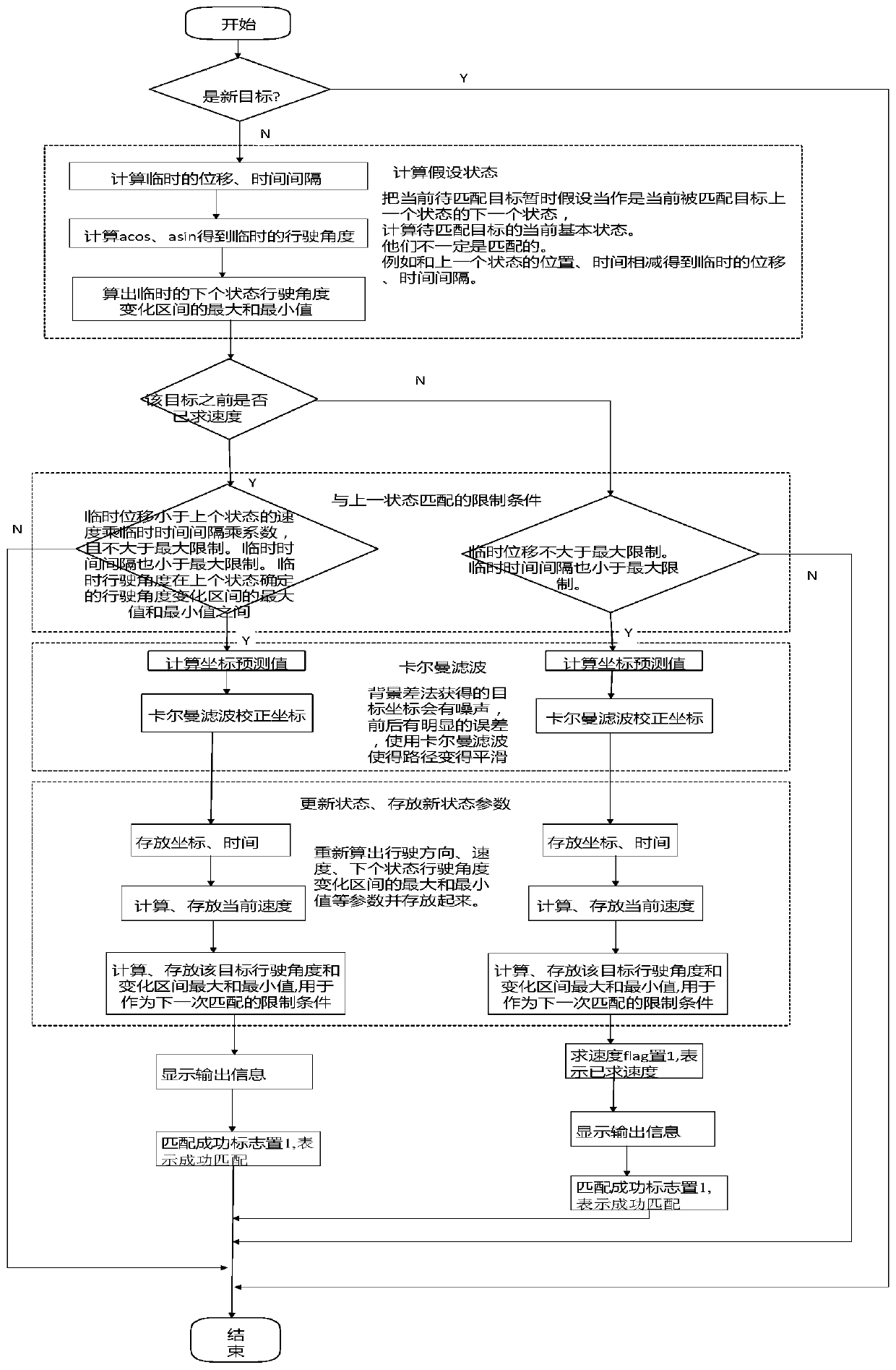
[0103] The embodiment of the present invention discloses a real-time trajectory extraction method of non-person and multi-target in a traffic video scene, comprising the following steps:
[0104] S1 target detection: read the video frame, and use the background difference method to detect all targets in each frame;
[0105] Specifically, the formula for target detection is:
[0106]
[0107] f f is the current video frame, b f is the background ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More