A cargo identification and grabbing method, device and storage medium
A technology for goods and equipment, which is applied in the field of equipment and storage media, and goods identification and grasping methods, can solve the problems of variable work efficiency and easy human error, and achieve the effect of reducing error rate and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0019] In the following description, if a suffix such as 'module', 'part' or 'unit' for denoting an element is used only to facilitate description of the present invention, it has no specific meaning by itself. Therefore, 'module', 'part' or 'unit' may be used in combination.
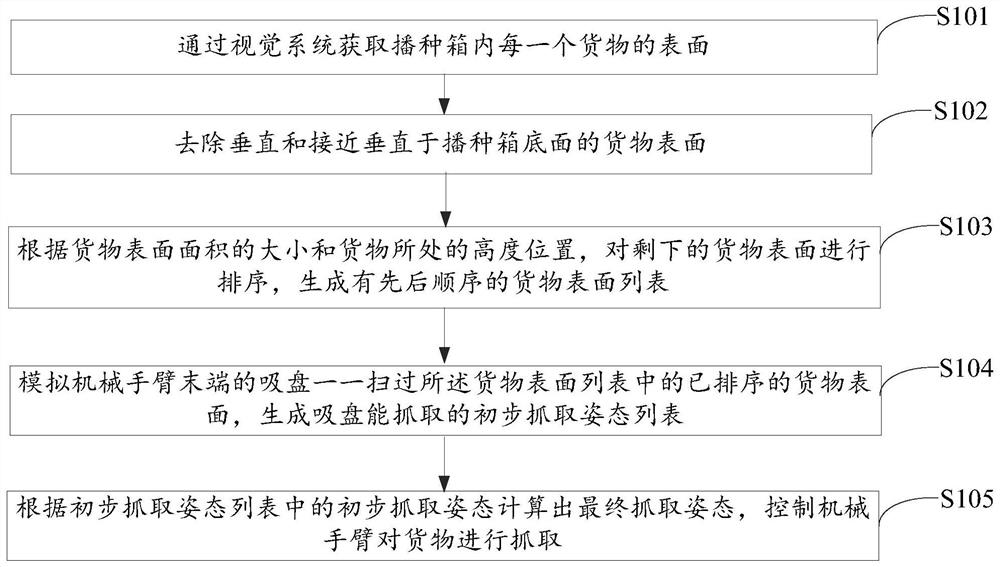
[0020] see figure 1 , is a flow chart of a cargo identification and grabbing method provided in Embodiment 1 of the present invention. The cargo identification and grasping method in this embodiment is applicable to cargo identification and grasping equipment, and the cargo identification and grasping equipment involved in this example refers to a sowing robot. The sowing robot includes a vision system and a mechanical arm for grabbing goods, and at least one suction cup is arranged at the end of the mechanical arm.
[0021] The method flow ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More