

Automatic charging method and mobile robot
A technology for mobile robots and charging piles, applied in machine parts, non-electric variable control, instruments, etc., can solve problems such as misjudging the orientation of charging piles, infrared signals being susceptible to external influences, and charging failures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
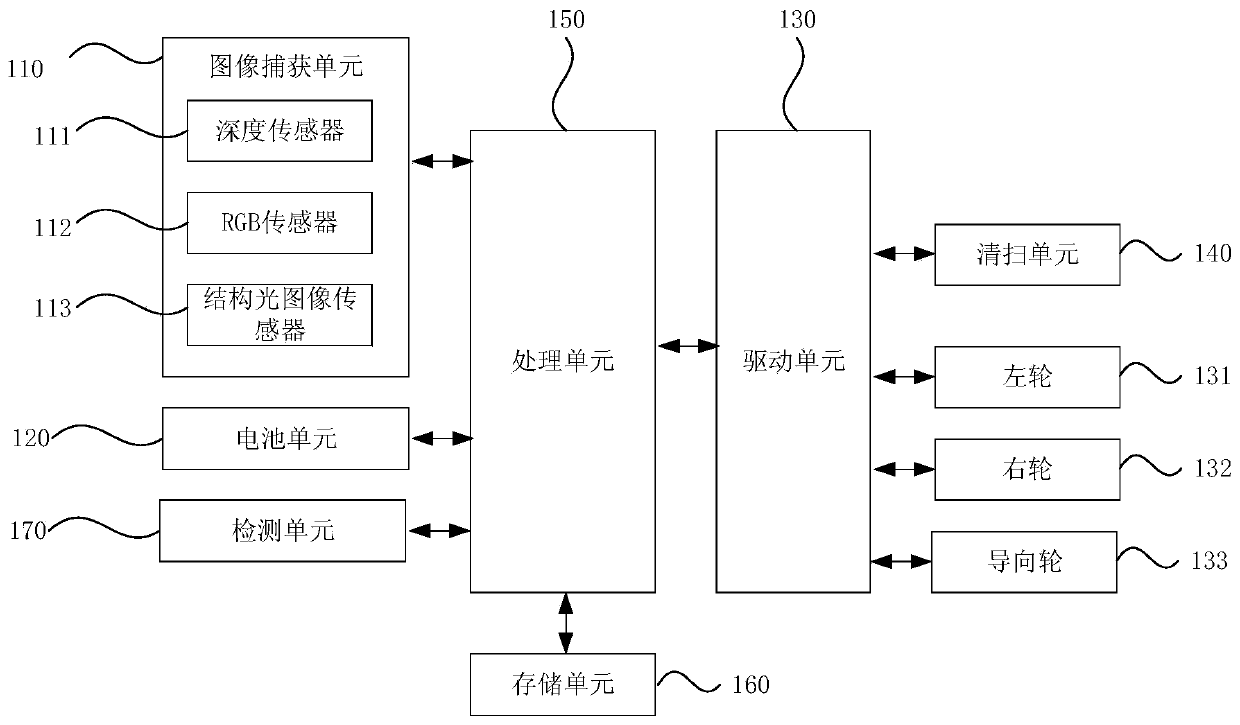
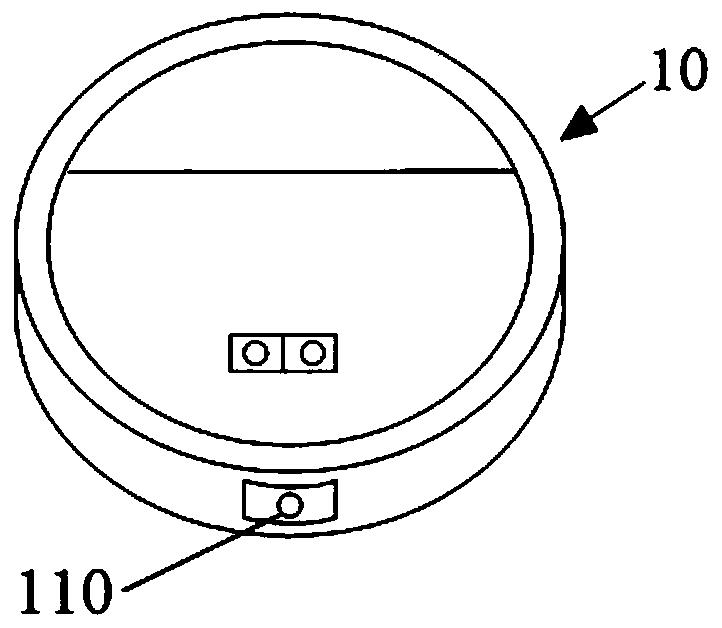
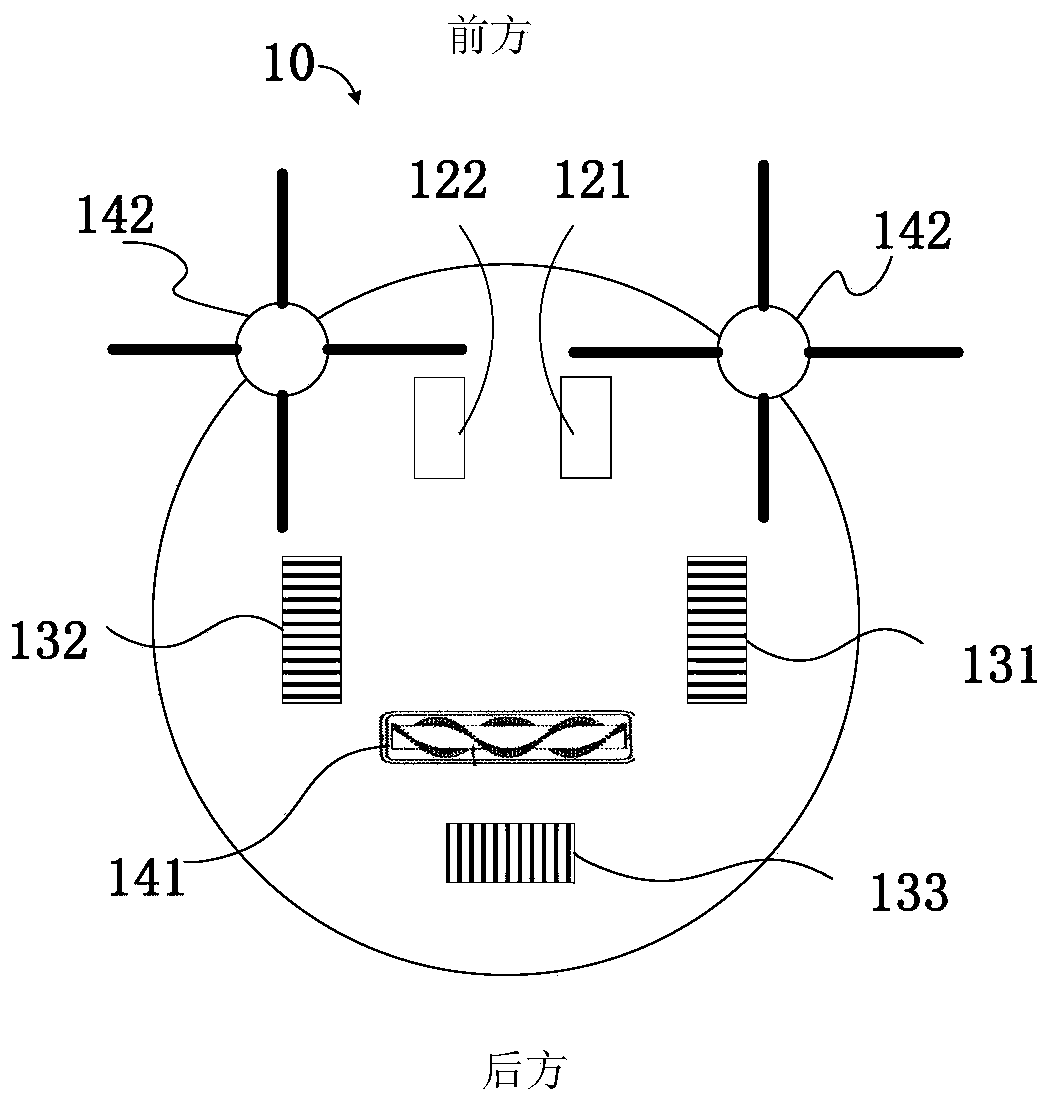
[0035] refer to figure 1 , an embodiment of the mobile robot provided by the present application includes: an image capture unit 110, a battery unit 120, a drive unit 130, a left wheel 131, a right wheel 132, a guide wheel 133, a cleaning unit 140, a processing unit 150, a storage unit 160, a detection Unit 170.
[0036] The image capture unit 110 is used to capture images in the working environment of the mobile robot. The image capturing unit 110 includes one or more cameras of a two-dimensional camera and a three-dimensional camera. For example, a two-dimensional camera may be placed on the upper surface of the mobile robot and capture an image of above the mobile robot, ie, an image of the ceiling of the space to be worked.
[0037] As another example, a 3D camera is placed at the front of the mobile robot and captures the 3D image viewed by the mobile robot. The three-dimensional image includes information about the distance from the object to be captured to the two-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More