

Grabbing-stable building robot
A construction robot and stable technology, applied in construction, building structure, processing of building materials, etc., can solve problems such as large grasping force, unfavorable placement and grasping of special items, cracks, etc., to achieve the effect of balanced grasping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing.
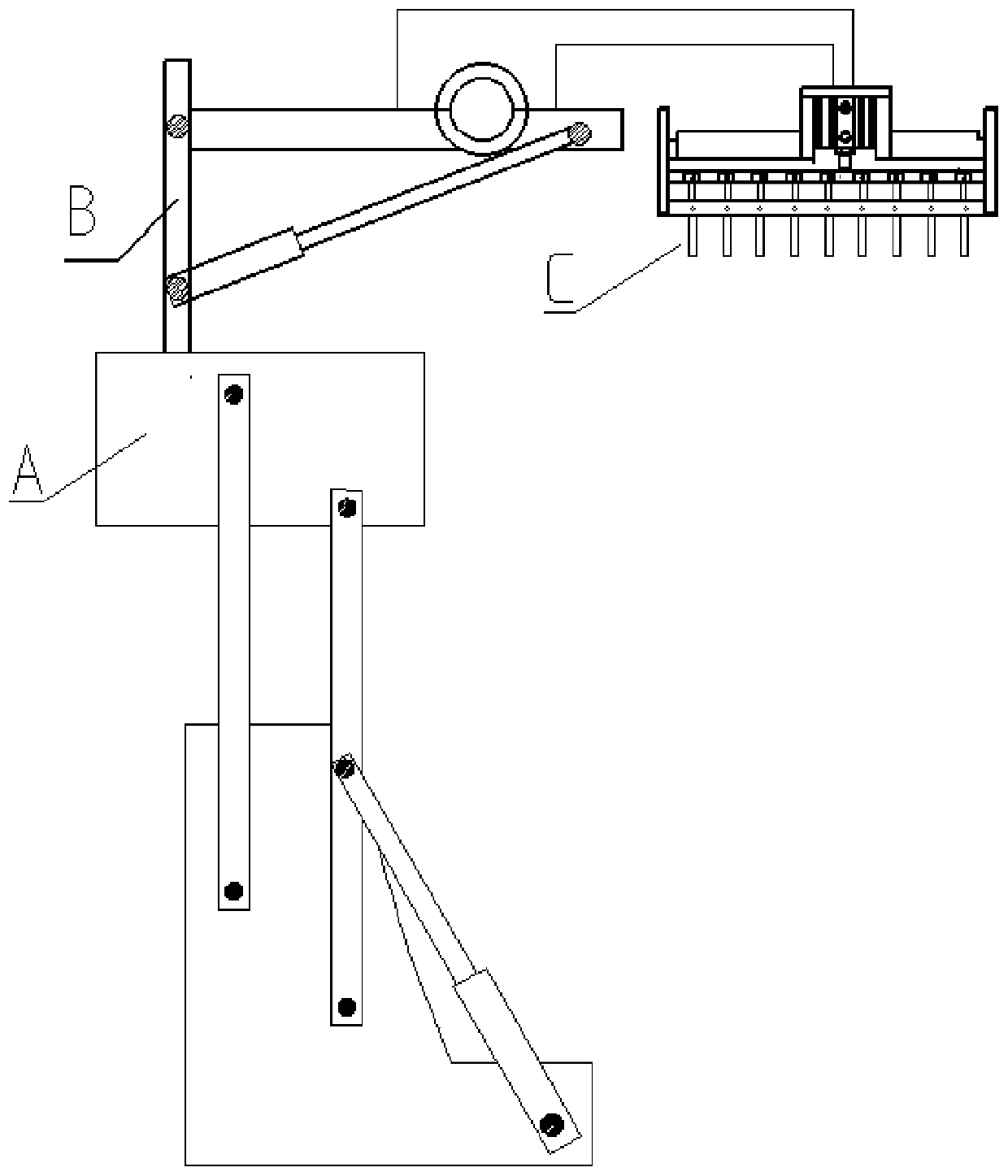
[0032] Such as figure 1 As shown, a construction robot for steady grabbing of the present invention includes a leveling device A, a movable device B and a grabbing device C, the grabbing device C is fixed on the movable device B, and the movable device B is fixed on the leveling device A on platform 2A.
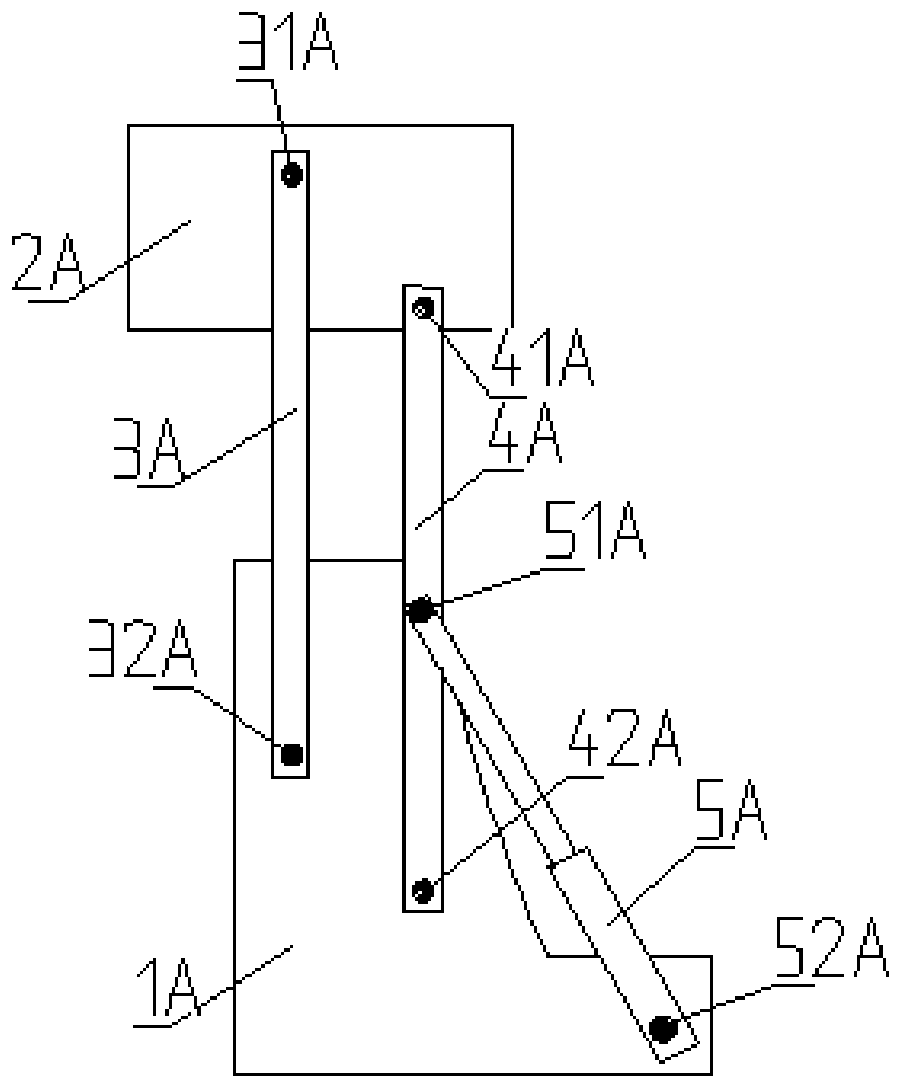
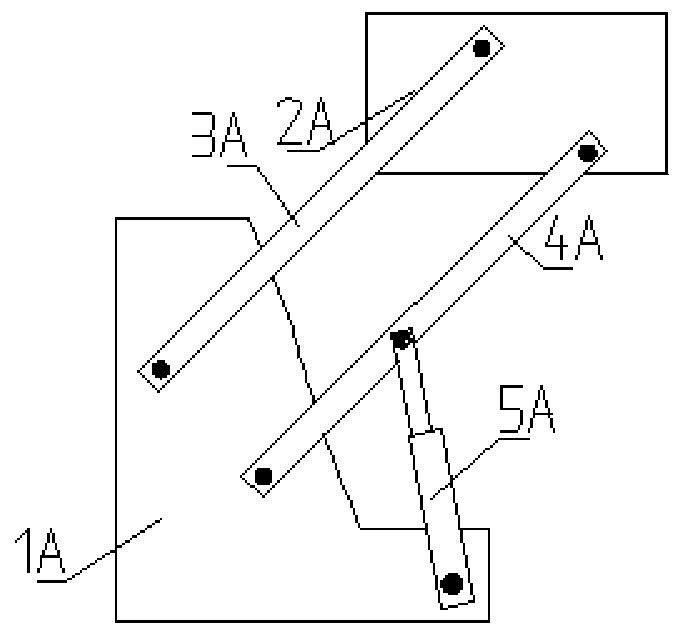
[0033] Such as Figure 2 to Figure 5 As shown, the flat transportation device A of the present invention includes a support platform 1A, a flat transportation platform 2A and two sets of flat transportation structures. Peaceful platform 2A.
[0034] Such as Figure 2 to Figure 4 As shown, each set of flat transportation structure includes a first support rod 3A, a second support rod 4A and a driving device 5A, the first support rod 3A is installed on the flat transportation platform 2A through a first movable connection 31A, and the first support rod 3A passes through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More