

Driverless smart car automatic collision avoidance method based on quantum wolf pack algorithm
A wolf pack algorithm, unmanned technology, applied in two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings, but it is not limited thereto. Any modification or equivalent replacement of the technical solution of the present invention without departing from the spirit and scope of the technical solution of the present invention should be covered by the present invention. within the scope of protection.
[0025] The invention provides an automatic collision avoidance method for unmanned intelligent vehicles based on the quantum wolf pack algorithm, such as Figure 9 As shown, the method includes the following steps:
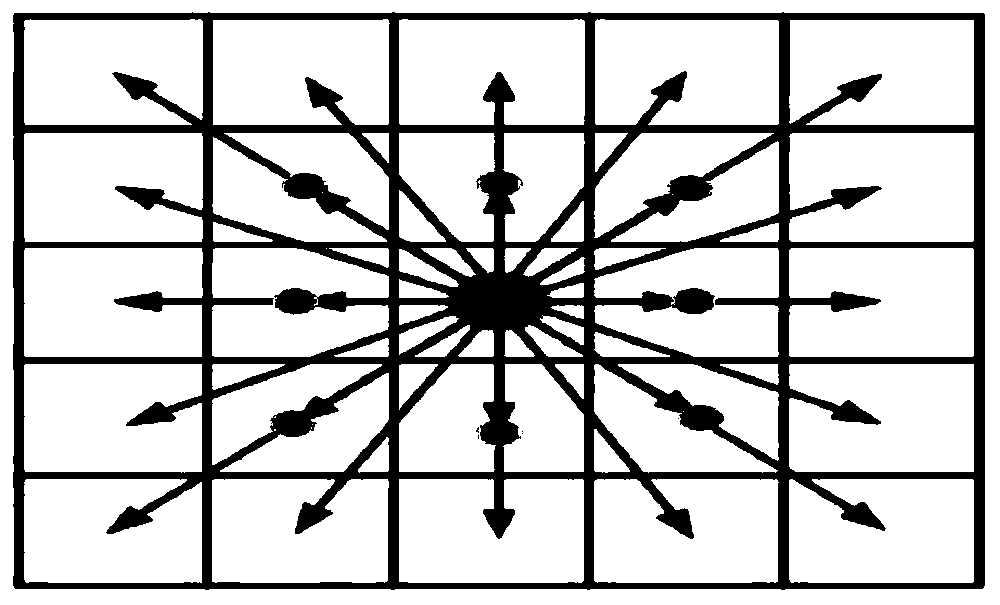
[0026] Step 1. Use environmental sensors to scan the surrounding environment of the smart car within a certain distance (the experimental platform is built within about 10 meters), and use the obstacle sensor data processed by the multi-sensor data fusion algorithm to establish the environment through the Gmapping open source algorithm pack...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More