

A flexible joint and robot with large rotation angle driven by rope
A rope-driven, flexible joint technology, applied in the field of robotics, can solve problems such as lack of flexibility, and achieve the effect of flexible design, good flexibility, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
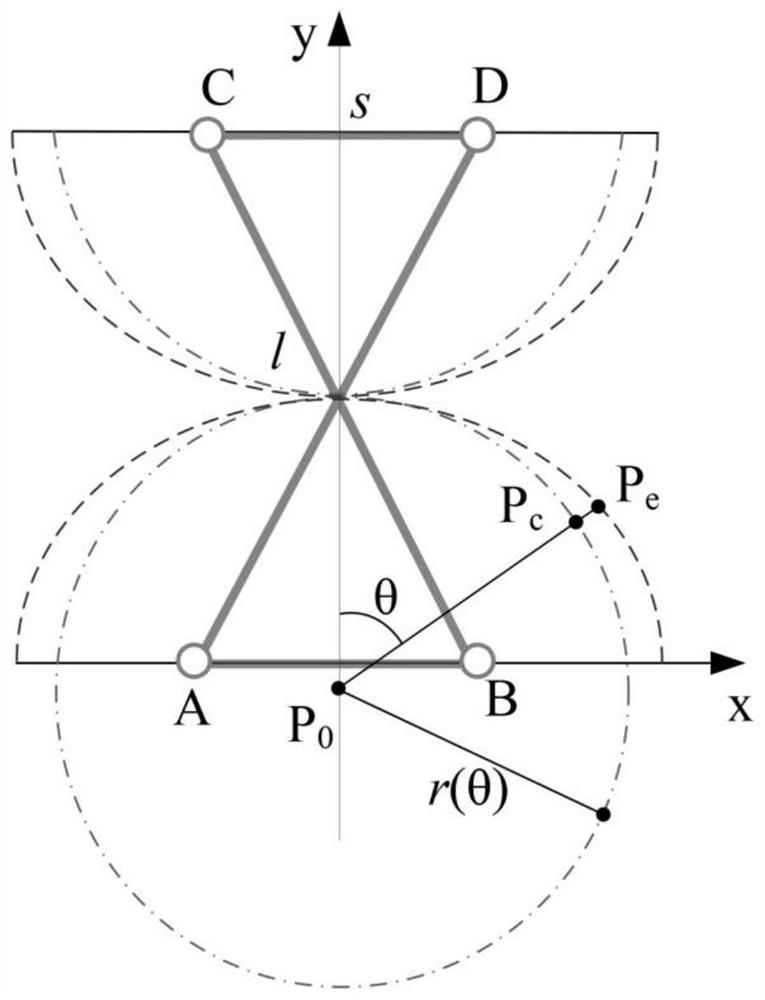
[0031]This embodiment provides a rope-driven large-angle flexible joint, in order to facilitate understanding of the present embodiment, the principle of the counter-line four-side mechanism mentioned in the present embodiment will be described in detail.
[0032]About counter parallel quadrangular mechanism and its spherical approach
[0033]Seefigure 1 In order to make the institution's moving center tracks approximately a circle, assume that P0(0, c0) For the heart of the imaginary circle, the false radius of the false circle is R, considering the intersection of a radius and the imaginary circle is Pc(xcYc), The intersection of the ellipse is Pe(xeYe).
[0034]Easible from geometric relationships
[0035]ye= Xe / tan θ + c0
[0036]
[0037]From the above two forms available
[0038]
[0039]Among them, definitions | Pcpe| = | P0pe| -r, when | PcpeWhen it is close to zero, the moving center track is approximately a circle, and the mechanism parameter values that meet the requirements of the desired r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More